Qing Li - Real-Time Concepts for Embedded Systems
Здесь есть возможность читать онлайн «Qing Li - Real-Time Concepts for Embedded Systems» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: San Francisco, Год выпуска: 2003, ISBN: 2003, Издательство: CMP books, Жанр: ОС и Сети, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Real-Time Concepts for Embedded Systems
- Автор:
- Издательство:CMP books
- Жанр:
- Год:2003
- Город:San Francisco
- ISBN:1-57820-124-1
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Real-Time Concepts for Embedded Systems: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Real-Time Concepts for Embedded Systems»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Delve into the details of real-time programming so you can develop a working knowledge of the common design patterns and program structures of real-time operating systems (RTOS). The objects and services that are a part of most RTOS kernels are described and real-time system design is explored in detail. You learn how to decompose an application into units and how to combine these units with other objects and services to create standard building blocks. A rich set of ready-to-use, embedded design “building blocks” is also supplied to accelerate your development efforts and increase your productivity.
Experienced developers new to embedded systems and engineering or computer science students will both appreciate the careful balance between theory, illustrations, and practical discussions. Hard-won insights and experiences shed new light on application development, common design problems, and solutions in the embedded space. Technical managers active in software design reviews of real-time embedded systems will find this a valuable reference to the design and implementation phases.
Qing Li is a senior architect at Wind River Systems, Inc., and the lead architect of the company’s embedded IPv6 products. Qing holds four patents pending in the embedded kernel and networking protocol design areas. His 12+ years in engineering include expertise as a principal engineer designing and developing protocol stacks and embedded applications for the telecommunications and networks arena. Qing was one of a four-member Silicon Valley startup that designed and developed proprietary algorithms and applications for embedded biometric devices in the security industry.
Caroline Yao has more than 15 years of high tech experience ranging from development, project and product management, product marketing, business development, and strategic alliances. She is co-inventor of a pending patent and recently served as the director of partner solutions for Wind River Systems, Inc. About the Authors
Real-Time Concepts for Embedded Systems — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Real-Time Concepts for Embedded Systems», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Over the years, many versions of operating systems evolved. These ranged from general-purpose operating systems (GPOS), such as UNIX and Microsoft Windows, to smaller and more compact real-time operating systems, such as VxWorks. Each is briefly discussed next.
In the 60s and 70s, when mid-sized and mainframe computing was in its prime, UNIX was developed to facilitate multi-user access to expensive, limited-availability computing systems. UNIX allowed many users performing a variety of tasks to share these large and costly computers. multi-user access was very efficient: one user could print files, for example, while another wrote programs. Eventually, UNIX was ported to all types of machines, from microcomputers to supercomputers.
In the 80s, Microsoft introduced the Windows operating system, which emphasized the personal computing environment. Targeted for residential and business users interacting with PCs through a graphical user interface, the Microsoft Windows operating system helped drive the personal-computing era.
Later in the decade, momentum started building for the next generation of computing: the post-PC, embedded-computing era. To meet the needs of embedded computing, commercial RTOSes, such as VxWorks, were developed. Although some functional similarities exist between RTOSes and GPOSes, many important differences occur as well. These differences help explain why RTOSes are better suited for real-time embedded systems.
Some core functional similarities between a typical RTOS and GPOS include:
· some level of multitasking,
· software and hardware resource management,
· provision of underlying OS services to applications, and
· abstracting the hardware from the software application.
On the other hand, some key functional differences that set RTOSes apart from GPOSes include:
· better reliability in embedded application contexts,
· the ability to scale up or down to meet application needs,
· faster performance,
· reduced memory requirements,
· scheduling policies tailored for real-time embedded systems,
· support for diskless embedded systems by allowing executables to boot and run from ROM or RAM, and
· better portability to different hardware platforms.
Today, GPOSes target general-purpose computing and run predominantly on systems such as personal computers, workstations, and mainframes. In some cases, GPOSes run on embedded devices that have ample memory and very soft real-time requirements. GPOSes typically require a lot more memory, however, and are not well suited to real-time embedded devices with limited memory and high performance requirements.
RTOSes, on the other hand, can meet these requirements. They are reliable, compact, and scalable, and they perform well in real-time embedded systems. In addition, RTOSes can be easily tailored to use only those components required for a particular application.
Again, remember that today many smaller embedded devices are still built without an RTOS. These simple devices typically contain a small-to-moderate amount of application code. The focus of this book, however, remains on embedded devices that use an RTOS.
4.3 Defining an RTOS
A real-time operating system (RTOS) is a program that schedules execution in a timely manner, manages system resources, and provides a consistent foundation for developing application code. Application code designed on an RTOS can be quite diverse, ranging from a simple application for a digital stopwatch to a much more complex application for aircraft navigation. Good RTOSes, therefore, are scalable in order to meet different sets of requirements for different applications.
For example, in some applications, an RTOS comprises only a kernel, which is the core supervisory software that provides minimal logic, scheduling, and resource-management algorithms. Every RTOS has a kernel. On the other hand, an RTOS can be a combination of various modules, including the kernel, a file system, networking protocol stacks, and other components required for a particular application, as illustrated at a high level in Figure 4.1.
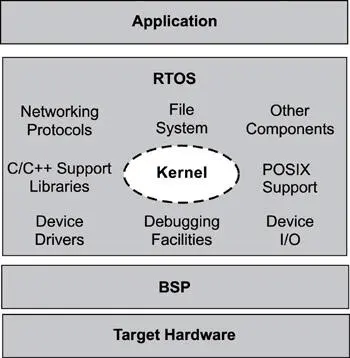
Figure 4.1: High-level view of an RTOS, its kernel, and other components found in embedded systems.
Although many RTOSes can scale up or down to meet application requirements, this book focuses on the common element at the heart of all RTOSes-the kernel. Most RTOS kernels contain the following components:
· Scheduler- is contained within each kernel and follows a set of algorithms that determines which task executes when. Some common examples of scheduling algorithms include round-robin and preemptive scheduling.
· Objects- are special kernel constructs that help developers create applications for real-time embedded systems. Common kernel objects include tasks, semaphores, and message queues.
· Services- are operations that the kernel performs on an object or, generally operations such as timing, interrupt handling, and resource management.
Figure 4.2 illustrates these components, each of which is described next.
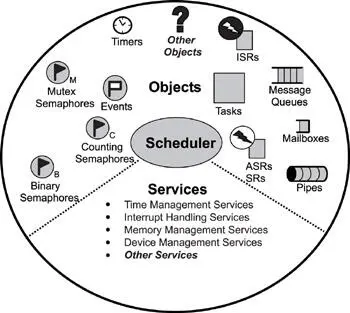
Figure 4.2: Common components in an RTOS kernel that including objects, the scheduler, and some services.
This diagram is highly simplified; remember that not all RTOS kernels conform to this exact set of objects, scheduling algorithms, and services.
4.4 The Scheduler
The scheduler is at the heart of every kernel. A scheduler provides the algorithms needed to determine which task executes when. To understand how scheduling works, this section describes the following topics:
· schedulable entities,
· multitasking,
· context switching,
· dispatcher, and
· scheduling algorithms.
4.4.1 Schedulable Entities
A schedulable entity is a kernel object that can compete for execution time on a system, based on a predefined scheduling algorithm. Tasks and processes are all examples of schedulable entities found in most kernels.
A task is an independent thread of execution that contains a sequence of independently schedulable instructions. Some kernels provide another type of a schedulable object called a process. Processes are similar to tasks in that they can independently compete for CPU execution time. Processes differ from tasks in that they provide better memory protection features, at the expense of performance and memory overhead. Despite these differences, for the sake of simplicity, this book uses task to mean either a task or a process.
Note that message queues and semaphores are not schedulable entities. These items are inter-task communication objects used for synchronization and communication. Chapter 6 discusses semaphores, and Chapter 7 discusses message queues in more detail.
So, how exactly does a scheduler handle multiple schedulable entities that need to run simultaneously? The answer is by multitasking. The multitasking discussions are carried out in the context of uniprocessor environments.
4.4.2 Multitasking
Multitasking is the ability of the operating system to handle multiple activities within set deadlines. A real-time kernel might have multiple tasks that it has to schedule to run. One such multitasking scenario is illustrated in Figure 4.3.
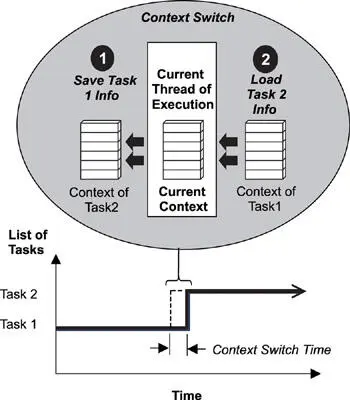
Figure 4.3: Multitasking using a context switch.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Real-Time Concepts for Embedded Systems»
Представляем Вашему вниманию похожие книги на «Real-Time Concepts for Embedded Systems» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.








Обсуждение, отзывы о книге «Real-Time Concepts for Embedded Systems» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.