Feynmann - Feynmann 1
Здесь есть возможность читать онлайн «Feynmann - Feynmann 1» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: Старинная литература, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Feynmann 1
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Feynmann 1: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Feynmann 1»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Feynmann 1 — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Feynmann 1», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Обозначим эту функцию положения через - U ( x , у, z); желая отметить, что речь идет именно о точке 2 с координатами x 2 , y 2, z 2, мы будем просто писать U (2), сокращая обозначение U( х г , у 2 , z 2). Работу перемещения из точки 1 в точку Р можно написать, обратив направление интегрирования (переменив знаки всех ds ). Другими словами, работа на участке (1,Р) равна работе на участке ( P , 1 ) со знаком минус:
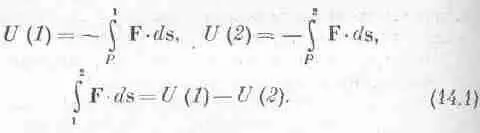
Значит, работа на участке (Р,1) есть - U ( 1 ), а на участке (Р,2) есть - U (2). Поэтому интеграл от 1 до 2 равен - U (2) плюс [ - U 1) назад], т. е. + U (1)- U (2):
Величина U (1)- U (2) называется изменением потенциальной энергии, a U можно назвать потенциальной энергией. Мы будем говорит, что когда предмет находится в положении 2, то он обладает потенциальной энергией U (2), а в положении 1 — потенциальной энергией U (1). Когда он находится в положении Р, его потенциальная энергия равна нулю. Если бы вместо Р взять любую другую точку Q , то оказалось бы (это предоставляется доказать вам самим), что потенциальная энергия всех точек изменилась бы только на постоянную добавку. Так как сохранение энергии зависит только от изменений ее, то эта добавочная постоянная никакого значения не имеет. Вот поэтому точка Р произвольна.
Итак, у нас имеются два утверждения: 1) работа, выполняемая силой, равна изменению кинетической энергии системы, но 2) математически для консервативных сил выполненная работа равна минус изменению функции U , называемой потенциальной энергией. Как следствие этих утверждений возникает еще одно: если действуют только консервативные силы, сумма потенциальной U и кинетической Т энергий остается постоянной:
T+U=const. (14.2)
Рассмотрим формулу потенциальной энергии для ряда случаев. Если поле тяготения однородно, если мы не поднимаемся до высот, сравнимых с радиусом Земли, то сила постоянна и направлена вертикально, а работа равна просто произведению силы на расстояние по вертикали. Стало быть,
U ( z )= mgz , (14.3)
и за точку Р с нулевой потенциальной энергией можно принять любую точку на поверхности z=0. Но можно также говорить, что потенциальная энергия равна mg ( z -6), если нам так уж этого хочется! Все результаты в нашем анализе останутся теми же, кроме того что потенциальная энергия на поверхности z=0 будет равна - mg 6. Разницы никакой, ведь в расчет надо принимать только разности потенциальных энергий.
Энергия, необходимая для сжатия пружины на расстояние х от точки равновесия, равна
U ( x )= 1 / 2 kx 2 (14.4)
и нуль потенциальной энергии приходится на точку х =0, т. е. на равновесное состояние пружины. И здесь тоже мы можем добавить любую константу.
Потенциальная энергия тяготения точечных масс M и m на расстоянии r друг от друга равна
U ( r )=- GMm / r . (14.5)
Константа здесь выбрана так, чтобы потенциал исчезал на бесконечности. Конечно, эту же формулу можно применить и к электрическим зарядам, поскольку закон один и тот же:
U ( r )= q 1 q 2 /4 p e 0 r . (14.6)
Давайте теперь поработаем с одной из этих формул, посмотрим, поняли ли мы их смысл.
Вопрос: С какой скоростью должна отправиться ракета с Земли, чтобы покинуть ее?
Ответ: Сумма кинетической и потенциальной энергий должна быть постоянной; покинуть Землю — значит удалиться от нее на миллионы километров; если у ракеты только-только хватает сил, чтобы покинуть Землю, то надо предположить, что там, вдалеке, ее скорость будет равна нулю и что на бесконечности она будет едва-едва двигаться. Пусть а — радиус Земли, а M — ее масса. Кинетическая плюс потенциальная энергии первоначально были равны l / 2 mv 2 - GmM / a . В конце движения эти обе энергии должны сравняться. Кинетическую энергию в конце движения мы считаем нулевой, потому что тело еле движется (почти с нулевой скоростью), а потенциальная энергия равна величине GmM , деленной на бесконечность, т. е. опять нулевая. Значит, с одной стороны стоит разность двух нулей; поэтому квадрат скорости должен быть равен 2 GM / a . Но GM/a 2это как раз то, что называют ускорением силы тяжести g . Итак,
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Feynmann 1»
Представляем Вашему вниманию похожие книги на «Feynmann 1» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.
Обсуждение, отзывы о книге «Feynmann 1» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.