George F. Elmasry - Dynamic Spectrum Access Decisions
Здесь есть возможность читать онлайн «George F. Elmasry - Dynamic Spectrum Access Decisions» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Dynamic Spectrum Access Decisions
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Dynamic Spectrum Access Decisions: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Dynamic Spectrum Access Decisions»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
dynamic spectrum access approach using the latest applications and techniques
Dynamic Spectrum Access Decisions: Local, Distributed, Centralized and Hybrid Designs Dynamic Spectrum Access Decisions · Licensed spectrum bands
· Unlicensed spectrum bands
· Civilian communications
· Military communications
Consisting of a set of techniques derived from network information theory and game theory, DSA improves the performance of communications networks. This book addresses advanced topics in this area and assumes basic knowledge of wireless communications.
Dynamic Spectrum Access Decisions — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Dynamic Spectrum Access Decisions», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Notice here the presence of another distributed cognitive engine for routing parallel to the DSA distributed decision fusion engine. 5Notice also that each engine may impact the other engine directly through information exchange and indirectly through the implemented decisions. For example, routing decision made by the cognitive routing engine will impact the spectrum map estimation created by the DSA decision fusion engine and vice versa. Notice also that the implementation of such an engine can use heuristic approaches that make it hard to predict the impact of creating reactive decisions. These cognitive engines may also have to coordinate before executing a decision such that each engine can predict the impact of other engines' decisions. This coordination will create an integrated system that avoids bad decisions. 6
Figure 4.4illustrates examples of information exchange and indirect impacts between these two cognitive engines. The routing engine may send the DSA engine a set of frequency slots it wants to consider for transmission with each frequency associated with the direction of transmission (based on knowing the geolocation of the receiving node) and the considered transmission power. The routing engine may expect the DSA engine to send it a reply to this query with the estimated interference level per each frequency slot. Based on this estimated interference level, the routing engine may decide which slot to use for the targeted destination node. When the over‐the‐air links are established, the used frequencies will have an impact on the spectrum map estimated by the DSA engine.
One important aspect of the routing engine that impacts the spectrum map estimated by the DSA engine is the antennas' directional model used by the routing engine. This antennas' directional model directly affects the decision if a frequency slot can be used or not. Let us consider the use of an antenna directional model that shows the involvement of the routing engine with a spectrum map and how the routing engine influences the DSA engine. The transmitting node DSA engine would need to estimate the interference power at the receiving node per each candidate frequency slot so that the routing engine would have enough information to decide which frequency slot to use. Notice that the DSA engine estimation of interference power has to be comprehensive considering all the nodes in the geographical proximity that are using the same frequency, the directions this frequency is being used, and the transmission power level of each use in order to ensure that the estimated interference level is accurate enough for the routing engine. Assuming a free space path loss, the following formula can be used by the DSA engine to estimate the interference level had a candidate slot been used by the routing engine.
(4.1) 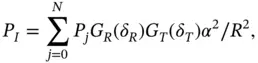
where:
I is the receiving node and PI is the estimated interference
Pj is transmit power from node j (all nodes j in geographical proximity are using this frequency slot at the same time)
GR is receiver antenna gain
δR is the absolute value of the difference between the pointing angle of the receive antenna and the bearing to the transmit node
GT is transmitter antenna gain
δT is the absolute value of the difference between the pointing angle of the transmit antenna and the bearing to the receive node
R is distance between receiver and transmitter
α is (C/4πf)2
link closure is a function of (δR, δT).
Notice that the DSA engine has to have knowledge of the geographical location of nodes in close vicinity and which frequencies are used at which direction for each node. This allows the DSA engine to estimate the interference power at the receiving node had the local node used the candidate frequency slot. Based on this interference level, the local node routing engine will determine if the interference level exceeds a given threshold or not before selecting the frequency slot to transmit at. Notice how such design can lead to relying more on distributed cooperative DSA decisions to coordinate between nodes.
The DSA engine has to estimate the pointing direction between two nodes in an accurate way. Figure 4.5illustrates the different factors the DSA engine has to consider. The DSA engine may use an absolute north as a reference to how the different angles in this estimation are related. Figure 4.5shows how “north” is used as a reference and how the angles are related.
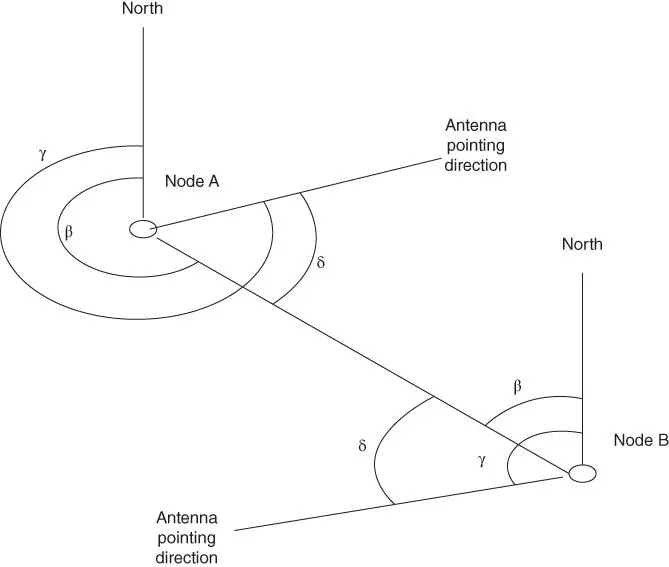
Figure 4.5Pointing directions between two nodes.
In Figure 4.5, notice the following:
γ is the antenna pointing direction, relative to north
β is the bearing of the other node, relative to north
δ is the angle between the pointing direction and the targeted node.
Note in Figure 4.5that β of either node is equal to 180° + β of the other node, which allows both δ angles to be determined at either end. This will require that the transmit power, antenna type, pointing angle, and location of the other nodes in the neighborhood using the same frequency slot must all be disseminated between the distributed DSA engines.
One can see the extensive distributed information that would need to be communicated between the different DSA engines in order for the DSA engine to be able to support a cognitive routing engine. In addition, the DSA engine is expected to perform extensive computations continually so that the routing engine has accurate estimations of the interference level of all potential frequency slots to use and all nodes in the neighborhood. 7
While the disadvantages of using these two distributed cognitive engines include the increase of over‐the‐air resources use for DSA control traffic and the need for local computational power to perform comprehensive local decision fusion tasks, the advantages of such design include the following:
1 Efficient use of spectrum resources, which can lead to higher throughput.
2 The ability to reuse the same frequency slot relying on directionality and power control, which also can lead to higher throughput of the system.
3 The ability to route around jammers.
4 Making the transmitting nodes spectrum emission less prone to eavesdropping by reducing the spectrum footprint of the formed MANET in comparison to using omnidirectional antennas.
5 The ability to dynamically adapt spectrum resources use to the specifics of the area of deployment (e.g. terrain) and achieve connectivity in the presence of external benign and/or malicious interferences.
These advantages can be critical in the use of DSA in military cognitive MANETs. One can see that the trade space in Figure 4.1is overly simplified and it can include other dimensions:
The low probability of detection (LPD) trade space, which can be measured with a metric that calculates the ratio of the combined spectrum footprint of all directional links to the entire theater area of operation.
The low probability of intercept (LPI) trade space, which can be measured with a metrics that calculates the probability of an eavesdropping node, randomly positioned in the theater's area of operation, to intercept a directional link.
The probability of avoiding jammed areas trade space, which can be measured with a metric that counts the number of successes and failures to establish routes around jammed areas where jammed areas are randomly positioned in the theater's area of operation.
4.4 How Far can Distributed Cooperative DSA Design go?
Интервал:
Закладка:
Похожие книги на «Dynamic Spectrum Access Decisions»
Представляем Вашему вниманию похожие книги на «Dynamic Spectrum Access Decisions» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.







Обсуждение, отзывы о книге «Dynamic Spectrum Access Decisions» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.