Diagnosis and Fault-tolerant Control 1
Здесь есть возможность читать онлайн «Diagnosis and Fault-tolerant Control 1» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Diagnosis and Fault-tolerant Control 1
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Diagnosis and Fault-tolerant Control 1: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Diagnosis and Fault-tolerant Control 1»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Diagnosis and Fault-tolerant Control 1 — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Diagnosis and Fault-tolerant Control 1», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Analytical redundancy uses a mathematical model of the system under investigation and therefore it is often referred to as the model-based approach to fault diagnosis.
I.4. Model-based fault diagnosis
This diagnosis task detects faults in the technical process, including actuators, components and sensors by measuring the available input and output variables u ( t ) and y ( t ). The principle of model-based fault diagnosis is depicted in Figure I.2.
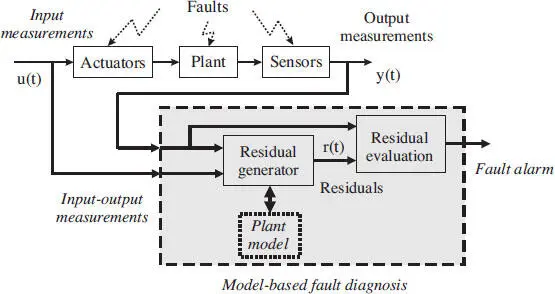
Figure I.2. Scheme for the model-based fault diagnosis
Basic process model-based FDI methods have been described by Patton et al . (1989, 2000), Basseville and Nikiforov (1993), Gertler (1998) and Chen and Patton (1999), which include the following steps:
1 1) output observers (OO, estimators, filters);
2 2) parity equations;
3 3) identification and parameter estimation.
These methods generate residuals for output variables with fixed parametric models using step 1, fixed parametric or non-parametric models using step 2 and adaptive non-parametric or parametric models using step 3.
An important aspect of these methods is the kind of fault to be detected. As noted above, one can distinguish between additive faults , which influence the variables of the process by summation, and multiplicative faults , which are products of the process variables. The basic methods show different results, depending on the type of fault.
If only output signals y ( t ) can be measured, signal model-based methods can be applied, for example, vibrations can be detected, which are related to rotating machinery or electrical circuits. Typical signal model-based methods of fault detection are as follows:
1 1) bandpass filters;
2 2) spectral analysis (FFT);
3 3) maximum-entropy estimation.
The characteristic quantities or features from fault detection methods show stochastic behavior with mean values and variances. Deviations from the normal behavior must then be detected by methods of change detection (residual analysis, Figure I.2), such as:
1 1) mean and variance estimation;
2 2) likelihood-ratio test, Bayes decision;
3 3) run-sum test.
I.5. Model uncertainty and fault detection
Model-based FDI makes use of mathematical models of the system. However, a perfectly accurate mathematical model of a physical system is not possible. Usually, the parameters of the system may vary with time, and the characteristics of the disturbances and noises are unknown, so they cannot be modeled accurately. Hence, there is always a mismatch between the actual process and its mathematical model, even under no fault conditions. Such discrepancies cause difficulties in FDI applications, in particular, since they act as sources of false alarms and missed alarms. Therefore, the effect of modeling uncertainties, disturbances and noise is the most crucial point in the model-based FDI concept, and the solution to this problem is the key for its practical applicability (Chen and Patton 1999).
To overcome these problems, a model-based FDI scheme has to be insensitive to modeling uncertainty. Sometimes, a reduction of the sensitivity to modeling uncertainty does not solve the problem, because the sensitivity reduction may be associated with a reduction of the sensitivity to faults (Gertler 1998; Chen and Patton 1999). A more meaningful formulation of the FDI problem is to increase the insensitivity to modeling uncertainty in order to provide increasing fault sensitivity.
The difficulties introduced by model uncertainties, disturbances and noises in model-based FDI have been widely considered during the last 10 years by both academia and industry (Gertler 1998). A number of methods have been proposed to tackle this problem, for example, the Unknown Input Observer (UIO), eigenstructure assignment and parity relation methods.
An important task of the model-based FDI scheme is to be able to diagnose incipient faults in a system. With respect to abrupt faults , incipient faults may have a small effect on residuals and can be hidden by disturbances. On the other hand, hard faults can be detected more easily because their effects are usually larger than modeling uncertainties and a simple fixed threshold is usually enough to diagnose their occurrence by residual analysis.
The presence of incipient faults may not necessarily degrade the performance of the plant, however, they may indicate that the component should be replaced before the probability of more serious malfunctions increases. The successful detection and diagnosis of incipient faults can therefore be considered a challenge for the design and evaluation of FDI algorithms.
I.6. Robust fault diagnosis
In the context of automatic control, the term robustness is used to describe the insensitivity or invariance of the performance of control systems with respect to disturbances, model–plant mismatches or parameter variations. Fault diagnosis schemes, on the other hand, must, of course, also be robust to the mentioned disturbances, but, in contrast to automatic control systems, they must not be robust to actual faults. On the contrary, while generating robustness to disturbances, the designer must maintain or even enhance the sensitivity of fault diagnosis schemes to faults. Furthermore, the robustness, as well as the sensitivity properties, must be independent of the particular fault and disturbance mode. Generally, the problem of robust FDI can be divided into the tasks of robust residual generation followed by robust residual evaluation .
In many cases, the disturbances and model–plant mismatches to which robustness must be generated are due to the use of linear models for describing dynamic behavior of nonlinear processes. Modeling errors can be avoided from the very beginning by focusing on robust residual generation methods using linear and nonlinear process models. This, in turn, simplifies the problem of residual evaluation without reducing the sensitivity to actual faults.
Effective tools for robust residual generation and even complete decoupling from external disturbances and unknown system parameters can be provided, for example, by UIOs, which are introduced and applied to industrial processes. It is shown that the proposed solution to the disturbance decoupling problem also provides the solution to both the fault detection and fault isolation problems.
On the other hand, many dynamic processes can only be described effectively using nonlinear mathematical models. However, most of the existing observer-based FDI techniques are limited to the use of linear process models. The methods that can be found in the literature are based on the assumption that the system under supervision stays, during normal operation, in a neighborhood of a certain known operating point (Chen and Patton 1999; Patton et al . 2000)
It is clear that, as almost every process system is nonlinear, the modeling errors almost always reduce the accuracy of the linear model and therefore the performance of the FDI algorithm is compromised. Various methods for generating robustness to linearization have been proposed in the literature and the reader is referred to (Patton et al . 2000, Chapter 7) for a comprehensive treatment of this subject.
This book also surveys the state of the art of robustness methods and presents some important ideas concerning the development of the use of nonlinear models and predictors for FDI. For example, observer-based approaches to robust FDI and FTC for dynamic systems are considered in more detail. The available model-based approaches are generalized, and thus extended to a wider class of dynamic systems.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Diagnosis and Fault-tolerant Control 1»
Представляем Вашему вниманию похожие книги на «Diagnosis and Fault-tolerant Control 1» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.








Обсуждение, отзывы о книге «Diagnosis and Fault-tolerant Control 1» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.