Cyberphysical Smart Cities Infrastructures
Здесь есть возможность читать онлайн «Cyberphysical Smart Cities Infrastructures» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Cyberphysical Smart Cities Infrastructures
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Cyberphysical Smart Cities Infrastructures: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Cyberphysical Smart Cities Infrastructures»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Cyberphysical Smart Cities Infrastructures: Optimal Operation and Intelligent Decision Making,
Cyberphysical Smart Cities Infrastructures
Cyberphysical Smart Cities Infrastructures — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Cyberphysical Smart Cities Infrastructures», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Apart from playing a pivotal role in the recent advances of the main fields, these datasets also proved to be useful when used with transfer learning methods to help underlying disciplines such as biomedical imaging [18, 19]. However, the aforementioned datasets are prune to restrictions. Firstly, at times it can get extremely costly, both in terms of time and money, to gather all the required data for the collection and label them. Secondly, the collection has to be monitored constantly to assure that they follow certain rules to avoid creating biases that could lead to erroneous results in future works [20] and also make sure that the collected data are all normal and uniform in terms of attributes such as background, size, position of the objects, lighting conditions, etc. However, in contrast, we know that in real‐world scenarios, this cannot be the case, and robots have to deal with a mixture of unnormalized noisy irrelevant data along with the relevant well‐curated ones. Additionally, the agent would be able to interact with the objects in the wild (e.g. picking it up and looking at the object from another angle) and also use its other senses such as smell and hearing to collect information ( Figure 3.1).
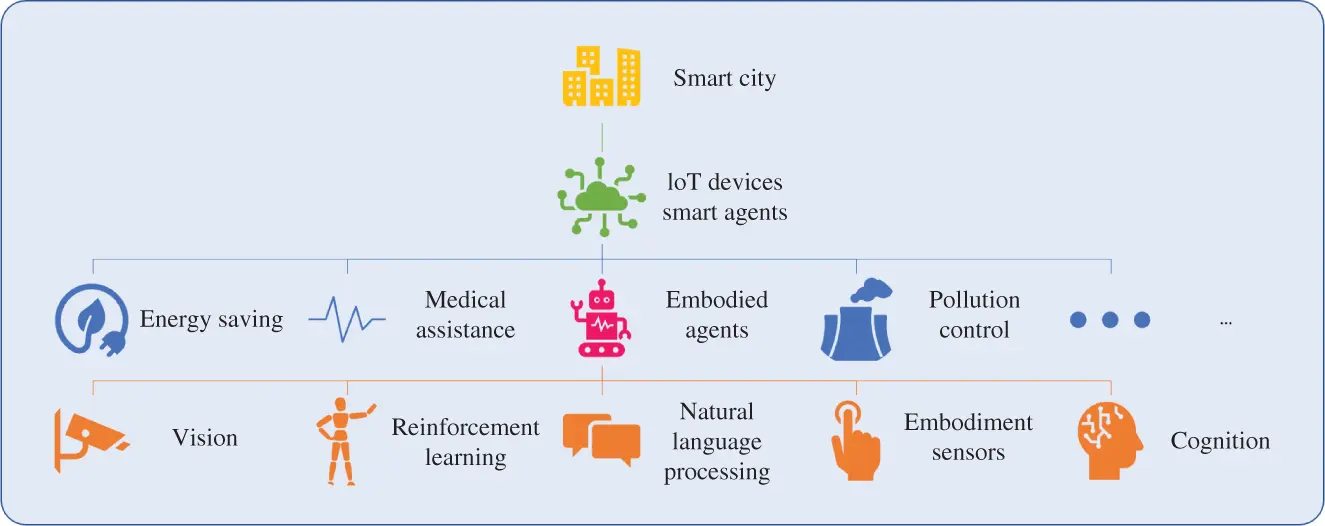
Figure 3.1 Embodied AI in smart cities.
Humans do learn from interactions, and it is a must for true intelligence in the real world. In fact, it is not only humans but also animals. In kitten carousel experiment [21], Held and Hein exhibited this beautifully. They studied the visual development of two kittens in a carousel over time. One of them had the ability to touch the ground and control its motions within the restrictions of the device, while the other was just a passive observer. At the end of the experiment, they found out that the visual development of the former kitten was normal, whereas for the latter one it was not, even though they both saw the same thing. This proves that being able to physically experience the world and interact with it is a key element for learning [22].
The goal of embodied AI is to bring the ability to interact and being able to use multisenses simultaneously into play to enable the robot to continuously learn in a lightly supervised or even unsupervised way in a rich dynamic environment.
3.2 Rise of the Embodied AI
In the mid‐1980s, a major paradigm shift took place toward embodiment, and computer science started to become more practical than theoretical algorithms and approaches. Embedded systems started to appear in all kinds of forms to aid humans in everyday life. Controllers for trains, airplanes, elevators, air conditioners, and software for translation and audio manipulation are some of the most important ones, to name a few [23].
Embodied artificial intelligence is a broad term, and those successes were for sure great ones to start with. Yet, it could clearly be seen that it was a huge room for improvement. Theoretically, the ultimate goal of AI is to not only master any given algorithm or task that is given to but also gain the ability to multitask and get to human‐level intelligence, and that as mentioned requires meaningful interaction with the real world. There are many specialized robots for a vast set of tasks out there, especially in large industries, which can do the assigned task to perfection, let it be cutting different metals, painting, soldering circuits, and many more. However, until one single machine emerges to have the ability to do different tasks or at least a small subset of them by itself and not just by following orders, it cannot be called intelligence.
Humanoids are the main thing that comes to mind when we talk about robots with intelligence. Although it is the ultimate goal, it is not the only form of intelligence on Earth. Other animals, such as insects, have their own kind of intelligence, and due to being relatively simpler compared to humans, they are a very good place to begin with.
Rodney Brooks has a famous argument that says it took the evolution much longer to create insects from scratch than getting to human‐level intelligence from there. Consequently, he suggested that these simpler biorobotics should be first dealt with in the road to make much more complex ones. Genghis, a six‐legged walking robot [24], is one of his contributions to this field.
This line of thought was a fundamental change and led researchers to have a change of direction in their work, and with that came attention to new domains and topics such as robotics, locomotion, artificial life, bioinspired systems, and so on. The classical approach did not care about tasks related to the interaction with the real world, and consequently, this journey is started by locomotion and grasping.
Since not much computational power was available at the time of this shift, a big challenge for the researchers was the trade‐off between simplicity and the potential to operate in complex environments. An extensive amount of work has been done in this area to explore or invent ways to exploit natural body dynamics, materials used in the modules, and their morphologies to make the robots move and become able to grasp and manipulate items without sophisticated processing units [25, 27]. It goes without saying that the ones who could use the physical properties of themselves and the environment to function were more energy‐efficient, but they had their own limitations. Not being able to generalize well to complex environments was a major drawback. However, they were fast as the machines with huge processing units needed a reasonable amount of time to think and plan their next action and often move their rigid and non‐smooth actuators.
Nowadays, a big part of these issues are solved, and we can see extremely fast and smooth natural moving robots capable of doing different types of maneuvers [28], but yet it is foreseen that with the advances of artificial muscles, joints, and tendons, this progress can be further improved.
3.3 Breakdown of Embodied AI
In this section, we try to categorize a broad range of research that has been done under the field of embodied AI. Due to the huge diversity, each section will necessarily be abstract and selective and reflect the authors' personal opinion.
3.3.1 Language Grounding
Machine and human communication has always been a topic of interest. As time goes on, more and more aspects of our lives are controlled by AIs, and hence it is crucial to have ways to talk with them. This is a must for giving new instructions to them or receiving an answer from them, and since we are talking about general day‐to‐day machines, we desire this interface to be higher level than programming languages and closer to spoken language. To achieve this, machines must be capable of relating language to actions and the world. Language grounding is the field that tries to tackle this and map natural language instructions to robot behavior.
Hermann et al.'s study shows that this can be achieved by rewarding an agent upon successful execution of written instructions in a 3D environment with a combination of unsupervised learning and reinforcement learning [29]. They also argue that their agent can generalize well after training and can interpret new unseen instructions and operate in unfamiliar situations.
3.3.2 Language Plus Vision
Now that we know that machines can understand languages and there exist sophisticated models just for this purpose out there [30], it is time to bring another sense into play. One of the most popular ways to show the potential of joint training of vision and language is the image and video captioning [31, 35].
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Cyberphysical Smart Cities Infrastructures»
Представляем Вашему вниманию похожие книги на «Cyberphysical Smart Cities Infrastructures» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.
![Чарльз Диккенс - A Tale of Two Cities [С англо-русским словарем]](/books/26616/charlz-dikkens-a-tale-of-two-cities-s-anglo-thumb.webp)



Обсуждение, отзывы о книге «Cyberphysical Smart Cities Infrastructures» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.