Andreas Schwarz - Astralreisen Algorithmus
Здесь есть возможность читать онлайн «Andreas Schwarz - Astralreisen Algorithmus» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на немецком языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Astralreisen Algorithmus
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Astralreisen Algorithmus: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Astralreisen Algorithmus»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Astralreisen Algorithmus — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Astralreisen Algorithmus», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Eine positive, klare und steuerbare Astralreise ist nur aus eigener Übung und eigenem Willen möglich. Auf eine natürliche Weise entstandene Astralreisen sind ungefährlich und können jederzeit nach freiem Willen beendet werden.
1.5 Die eingeschränkte Wahrnehmung
Wahrnehmung ist für uns Menschen ein klar definierter Begriff, mit dem wir tagtäglich zu tun haben. Ohne Wahrnehmung könnten wir nichts aus unserer Umwelt beobachten oder erfühlen, um anschließend direkt einzugreifen. In diesem Kapitel wirst du genauer darüber informiert, was deine Wahrnehmung ausmacht und welche Stufen es davon gibt. Damit du alles auf einfache Weise verstehen kannst, werden wir jetzt zusammen einen kleinen Roboter aufbauen. Um den eigentlichen Roboter ist gesorgt. Wir wollen aber, dass er selbstständig eine kleine Aufgabe lösen kann. Dazu müssen wir einige Dinge festlegen.
Ziel des Roboters
Damit unser Roboter „leben“ kann, braucht er ein Ziel. Ohne Ziel kann er keine Aufgabe lösen, oder sieht keine Aufgabe als logisch an. Somit wird dieser Roboter zwangsläufig nichts tun. Wir geben dem Roboter also die Aufgabe selbstständig aus einem Labyrinth herauszufinden.
Sensoren des Roboters
Damit unser Roboter einen Weg aus dem Labyrinth finden kann, muss er seine Umwelt wahrnehmen können. Er weiß ja sonst schließlich nicht, ob vor ihm eine Wand ist und weiß demnach nicht wann er abbiegen muss. Aus diesem Grund bauen wir an unserem Roboter mehrere Sensoren an. Als erstes verbauen wir an ihn einen Tastsensor. Dieser wird aktiviert, wenn der Roboter bzw. der Tastsensor eine Wand berührt. Somit ist der Roboter in der Lage sich durch das Labyrinth zu tasten. Da wir wissen, dass allein das Tasten in der Dunkelheit sehr schwierig ist, lassen wir unserem Roboter das Licht der Welt erblicken. Wir verbauen also zwei Ultraschallsensoren, die den Abstand zur Wand messen können. Zudem kann der Roboter den Ultraschallsensor in alle Richtungen drehen, damit er nach vorne, links, rechts und nach hinten auditiv sehen kann.
Aktoren des Roboters
Der Roboter muss sich schließlich frei bewegen können, deshalb ist es nötig einen Motor einzubauen, der die Räder antreiben kann. Jetzt ist der Roboter in der Lange vorwärts und rückwärts zu fahren. Ebenso kann er nach links und nach rechts abbiegen.
Prozessor des Roboters
Der Prozessor ist wichtig, um den Roboter zu steuern. Jede elektronische Baugruppe wird mit dem Prozessor verbunden. Dieser entscheidet, was der Roboter zu tun hat. Er steuert die Bewegungsabläufe des Motors, überwacht den Abstandssensor und den Tastsensor. Er wertet ständig einkommende Daten aus, um sie in die richtige Bewegung umzuwandeln. Zusätzlich wird ein Algorithmus in den Prozessor implementiert, damit der Roboter nicht ständig im Kreis fährt, sondern sich Wege merkt, die er bereits gefahren ist. Somit wird es erst möglich den Labyrinthausgang zu finden. Wichtig ist auch , dass wir im Roboter bestimmte Modi einrichten. Somit können wir ihn beispielsweise auf Standby, Batterie laden oder Geschwindigkeit 1 und 2 schalten.
Um alles miteinander in Einklang zu bringen, wählen wir jetzt die richtigen Elemente aus. Der Ultraschallsensor muss gut genug sein, damit er rechtzeitig eine Wand erkennen kann. Es ist aber nicht nötig, dass er hochpräzise und millimetergenau messen kann, denn somit wird der Sensor immer größer, komplizierter und teurer. Er sollte also für unseren Zweck gerade ausreichen. Das Gleiche gilt auch für alle anderen Bauteile, ebenso für den Prozessor. Wir brauchen keinen Quad-Core Prozessor, der aus unserem Roboter ein Genie macht, sondern wollen ihn einfach nur den Labyrithausgang finden lassen.
Ich hoffe du hast mittlerweile die Analogie zu uns Menschen erkannt und weißt jetzt, worauf es hier hinausgeht. Wir Menschen haben auch Ziele, die wir wahrnehmen und somit unseren Lebensweg strukturieren. Wir haben Sinne, mit denen es möglich ist unsere Umwelt zu sehen, zu hören oder abzutasten. Alle diese Eindrücke werden von unserem Gehirn wahrgenommen und verarbeitet. Unsere Erfahrungen und unser Verstand dirigiert Signale an unseren Körper, der dann in der Lage ist, in die Umwelt einzugreifen. Auch wir haben verschiedene Modi, die unser Bewusstsein in einen Schlafzustand bringen um Energie zu tanken und sich zu erholen. Als kleine Übersicht dient die folgende Tabelle.
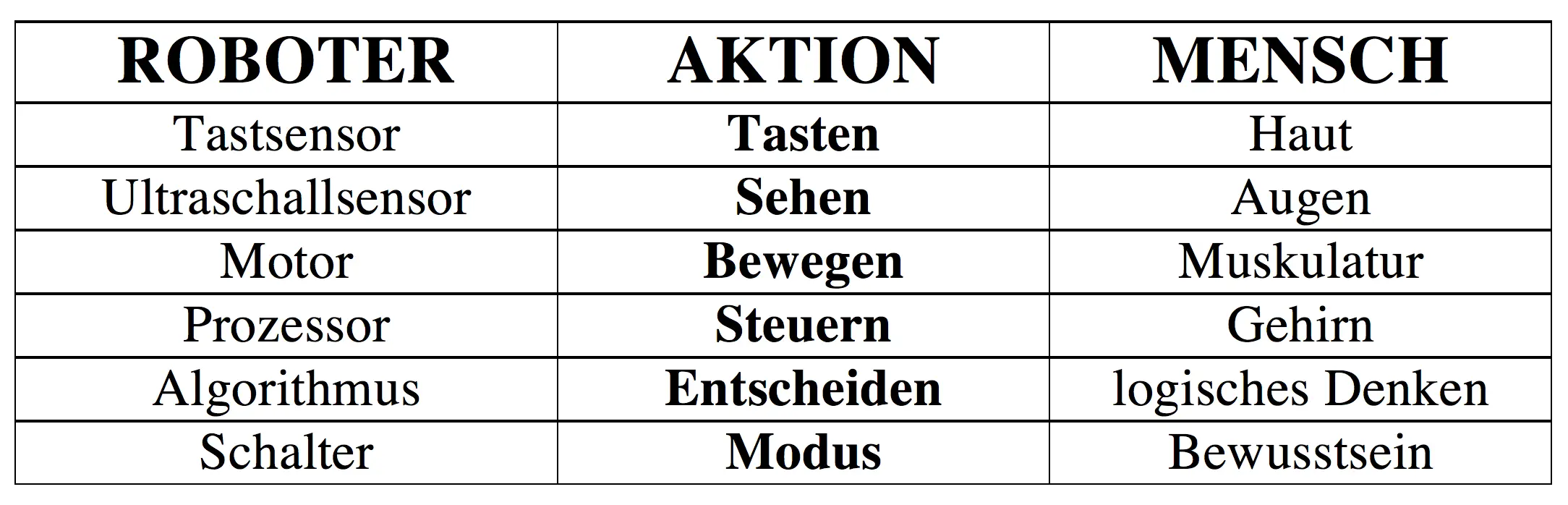
Wir haben unserem Roboter also eine beschränkte Wahrnehmung gegeben. Er ist nicht in der Lage das Gleiche zu sehen wie ein Mensch, kann aber dennoch sehen. Er ist auch nicht in der Lage zu denken wie ein Mensch, kann aber trotzdem in einem gewissen Maß denken. Ich möchte uns Menschen nicht als allwissende Perfektion eines Lebewesens darstellen, sondern ganz im Gegenteil. Das Beispiel mit dem Roboter möchte ich jetzt auf den Menschen projizieren, denn unsere Sinne haben auch Grenzen. Wir können genauso wie der Roboter nicht alles Wahrnehmen, sondern nur das, wofür wir ausgelegt sind.
1.5.1 Exterozeption
Nun gehen wir näher auf den Menschen ein. Wir haben schon früh erkannt, dass wir unsere Umwelt anhand der Sinne wahrnehmen, was als Exterozeption bezeichnet wird. Jeder dieser Sinne hat einen Wahrnehmungsbereich, indem er eingesetzt werden kann. Doch wie viel kriegen wir von unserer Umwelt wirklich mit? Dies wird durch die Betrachtung unserer 5 Hauptsinne näher erläutert.
Visuelle Wahrnehmung
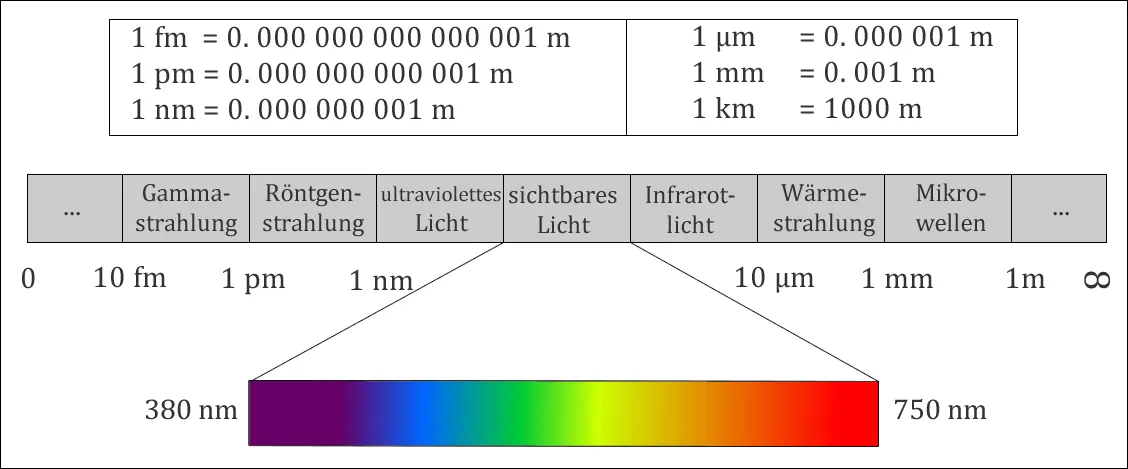
Abbildung A: Elektromagnetisches Spektrum (volle Größe: goo.gl/H6pfRN)
Die visuelle Wahrnehmung wird für uns als das Sehen bezeichnet. Alles was wir sehen ist Licht. Wir können keinen Tisch und auch keinen Stuhl sehen. Alles was wir durch das Auge wahrnehmen, ist das Licht das von diesem Objekt auf unser Auge reflektiert wird. Entfernungen können wir auch nur deswegen messen, weil Menschen zwei Augen besitzen. Da das Licht eine Welle ist, kann es verschiedene Schwingungen haben. Man bezeichnet dies auch als Wellenlänge des Lichts. Das Auge nimmt verschiedene Wellenlängen unterschiedlich wahr. Somit ist es unserem Auge möglich Farben zu sehen. Die Wellenlänge wird in Meter gemessen und beschreibt die Länge einer Periode, also den Teil der Schwingung die ständig wiederholt wird. Das folgende Bild zeigt das Lichtspektrum und den Bereich, den wir Menschen sehen können.
Es gibt also Wellenlängen, die so klein sind, dass sie an Null grenzen. Im Gegensatz dazu gibt es auch Wellenlängen die theoretisch bis ins Unendliche gehen. Wir als Menschen nehmen nur einen Bruchteil des Lichtspektrums wahr. Dies entspricht in Zahlen 0, 000 000 380 m bis 0, 000 000 750 m. Jede Welle, die eine geringere oder höhere Wellenlänge aufweist, ist für unser Auge unsichtbar. Wir können also nicht einmal ansatzweise 1 % unserer Umwelt sehen, doch ist es ausreichend dafür uns in der Welt zurechtfinden zu können.
Auditive Wahrnehmung
Unter auditiver Wahrnehmung versteht man das Hören. In unserem Ohrinneren befindet sich das eigentliche Sinnesorgan: Das Trommelfell. Die Funktionsweise unseres Trommelfells ähnelt sehr stark dem, eines Mikrofons. Dazu müssen wir erst einmal verstehen, wie man Geräusche unterscheiden kann. Ähnlich wie beim Licht, bestehen Geräusche aus Wellen. In der Akustik misst man die Welle üblicherweise nicht in der Wellenlänge, sondern in Hertz. Die Einheit Hertz bezeichnet die Anzahl der Schwingungsperioden pro Sekunde. Zur Verdeutlichung sehen wir uns das folgende Bild an.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Astralreisen Algorithmus»
Представляем Вашему вниманию похожие книги на «Astralreisen Algorithmus» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.









Обсуждение, отзывы о книге «Astralreisen Algorithmus» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.