Александр Барсуков - Кто есть кто в робототехнике. Выпуск I. Компоненты и решения для создания роботов и робототехнических систем
Здесь есть возможность читать онлайн «Александр Барсуков - Кто есть кто в робототехнике. Выпуск I. Компоненты и решения для создания роботов и робототехнических систем» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2005, ISBN: 2005, Жанр: Технические науки, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Кто есть кто в робототехнике. Выпуск I. Компоненты и решения для создания роботов и робототехнических систем
- Автор:
- Жанр:
- Год:2005
- Город:Москва
- ISBN:5-9706-0013-X
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Кто есть кто в робототехнике. Выпуск I. Компоненты и решения для создания роботов и робототехнических систем: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Кто есть кто в робототехнике. Выпуск I. Компоненты и решения для создания роботов и робототехнических систем»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Кто есть кто в робототехнике. Выпуск I. Компоненты и решения для создания роботов и робототехнических систем — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Кто есть кто в робототехнике. Выпуск I. Компоненты и решения для создания роботов и робототехнических систем», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Александр Павлович Барсуков
Кто есть кто в робототехнике
Выпуск I
Компоненты и решения для создания роботов и робототехнических систем
Введение
Этот идиллический пейзаж (рис. 1) из каталога фирмы FLIR Systems отразил тенденции развития робототехники. Хотя, строго говоря, робот здесь всего один – беспилотный самолёт. Но всё остальное насыщено элементами робототехники и вбирает такие её свойства, как мобильность, скоординированность действий, многосенсорность (на рис. 2 – шкала электромагнитных колебаний, на всё большем протяжении участков которой работают сенсоры роботов), умение ориентироваться в пространстве.
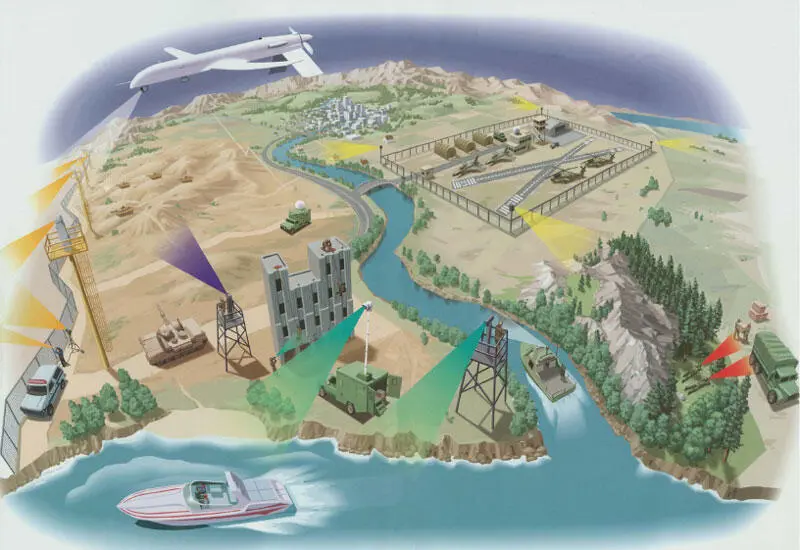
Рис. 1
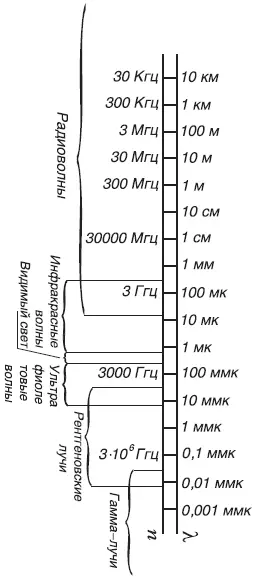
Рис. 2
Одно из характерных направлений исследовательской деятельности сегодня – единая среда навигации Universal Location Framework, в разработке которой ключевую роль играет исследовательское подразделение корпорации Intel. Оснащение вычислительных платформ, таких как карманные устройства и ноутбуки средствами определения местоположения позволяет создать среду для разработки множества новых моделей использования вычислительного оборудования. Каждая из этих новых моделей открывает возможность увеличения размеров всемирной беспроводной экосистемы. В корпорации Intel платформы, способные получать и использовать информацию о местоположении, называют «вычислительными системами для обработки информации о местоположении» (Location-Aware Computing, LAC).
После того как Федеральное управление связи США постановило, что каждый сетевой оператор обязан внедрить технологию Enhanced 911 (Е-911) для повышения надежности и эффективности работы скорой помощи, внимание отрасли к услугам на основе информации о местонахождении (Location-Based Services, LBS) значительно выросло. Даже модели, позволяющие получить не совсем точные данные о местонахождении – с погрешностью 15–30 метров – представляются весьма ценными и для разработчиков и для пользователей.
Текущая ситуация в области услуг на базе информации о местоположении характеризуется наличием множества технологий определения местоположения. В настоящее время среди технологий определения местоположения можно выделить хорошо известные: такие как системы глобального позиционирования (GPS) и триангуляции (клеточного разбиения) в сотовых сетях с использованием технологии Enhanced Observed Time of Difference (E-OTD) и новые технологии, например, на основе сигналов цифрового телевидения (DTV), ультраширокополосной связи (UWB) беспроводных локальных сетей (Wi-Fi) и так далее. Все эти технологии можно условно отнести к двум группам: на основе сетей и на основе устройств. Их также можно разделить с точки зрения среды применения, например, в помещениях или на открытом пространстве.
Различные среды требуют различных способов определения местоположения. Почему существует так много различных технологий определения местоположения? В частности потому, что существуют различные среды, в которых этим платформам приходится определять местоположение. Поскольку каждая из систем предназначена для использования в определенной среде, единая платформа, способная работать во всех средах, должна поддерживать целый набор технологий. К примеру, если нужно найти местоположение пользователя внутри здания, платформа может воспользоваться технологией, показывающей наилучшие результаты в помещениях, например, средствами беспроводной сети. С другой стороны, когда тот же пользователь выходит на улицу и желает узнать, в каком направлении находится интересующий его пункт, платформа может использовать систему GPS. Более того, иногда даже важно знать, что двое людей находятся не в разных комнатах, а в одной.
Существуют следующие ограничения для технологий определения местоположения:
• GPS (радиочастотная технология). Данные о местоположении – абсолютные. Точность 1–5 м, 95 %. Недостатки – низкие результаты внутри зданий.
• E-OTD (радиочастотная технология). Данные о местоположении – абсолютные. Точность 150–300 м, 95 %. Недостатки – необходимость находиться в зоне покрытия сети сотовой связи.
• Средства беспроводной сети (радиочастотная технология). Данные о местоположении – относительные. Точность 100 м. Недостатки – в основном подходит для использования в помещениях.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Кто есть кто в робототехнике. Выпуск I. Компоненты и решения для создания роботов и робототехнических систем»
Представляем Вашему вниманию похожие книги на «Кто есть кто в робототехнике. Выпуск I. Компоненты и решения для создания роботов и робототехнических систем» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




Обсуждение, отзывы о книге «Кто есть кто в робототехнике. Выпуск I. Компоненты и решения для создания роботов и робототехнических систем» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.