Александр Барсуков - Кто есть кто в робототехнике. Выпуск I. Компоненты и решения для создания роботов и робототехнических систем
Здесь есть возможность читать онлайн «Александр Барсуков - Кто есть кто в робототехнике. Выпуск I. Компоненты и решения для создания роботов и робототехнических систем» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2005, ISBN: 2005, Жанр: Технические науки, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Кто есть кто в робототехнике. Выпуск I. Компоненты и решения для создания роботов и робототехнических систем
- Автор:
- Жанр:
- Год:2005
- Город:Москва
- ISBN:5-9706-0013-X
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Кто есть кто в робототехнике. Выпуск I. Компоненты и решения для создания роботов и робототехнических систем: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Кто есть кто в робототехнике. Выпуск I. Компоненты и решения для создания роботов и робототехнических систем»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Кто есть кто в робототехнике. Выпуск I. Компоненты и решения для создания роботов и робототехнических систем — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Кто есть кто в робототехнике. Выпуск I. Компоненты и решения для создания роботов и робототехнических систем», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Рассмотрим применение GPS в «уличном» роботе (GPS хорошо работает только в пространстве под открытым небом). GPS приемник постоянно вычисляет широту и долготу на основе параметров сигналов, полученных от группировки специальных спутников. Как использовать такую информацию, чтобы довести своего робота к определённому месту назначения?
Для простоты предположим, что наш GPS приёмник оперирует информацией о местоположении относительно данного исходного пункта в форме «XY» (рис. 1.2). Координаты местоположения точки, к которой роботу необходимо двигаться – (Xg, Yg), а текущие координаты робота, снабженного GPS приемником – (Xr, Yr). Вычитание координат показывает, насколько робот должен изменить своё текущее положение (ΔХ, ΔY), чтобы достичь расположения цели. Таким образом, ΔХ = Xg – Xr, и ΔY = Yg – Yr.
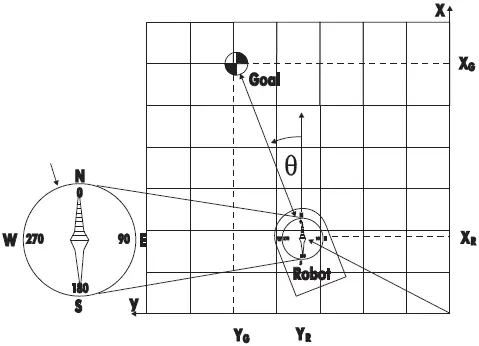
Рис. 1.2. Это исходное положение робота, использующего информацию, обеспеченную системой позиционирования. За основу для вычисления курса берётся безотносительное (абсолютное) местоположение робота и цели. Электронный компас (увеличенный вид компаса – слева) позволит роботу следовать найденным курсом
Мы используем систему координат, привязанную к географии Земли, как показано на рисунке, с осью X, направленной на север. Чтобы достичь точки расположения цели, мы должны сделать возможным движение робота по курсу под углом Θ относительно оси X. Элементарная тригонометрия сообщает нам, что угол, под которым мы должны двигаться, определяется из арктангенса изменений в положении «X» и «Y», то есть: Θ = tan -1(ΔY/ΔX).
Недостаточно знать только абсолютную позицию нашей цели и абсолютную позицию робота; мы должны также знать направление движения робота. Знание о направлении и величине поворота является сущностью самонаведения: требуемый поворот в движении есть разница между курсом, которым робот в настоящее время следует и курсом, по которому мы хотим, чтобы робот следовал.
GPS обеспечивает информацию о местоположении, но непосредственно не дает нам курс робота. Электронный компас поможет заполнить этот пробел. Чтобы направиться к цели, робот поворачивается до тех пор, пока курс, обозначенный компасом, не будет соответствовать требуемому курсу. Робот продолжает раз за разом «консультироваться» с GPS приемником по поводу безотносительного местоположения, вычисляя курс от абсолютных координат местонахождения цели: вычисляет требуемый курс, поворачивается по направлению к цели и продвигается, сокращая расстояние между собой и целью.
Конец ознакомительного фрагмента.
Текст предоставлен ООО «ЛитРес».
Прочитайте эту книгу целиком, купив полную легальную версию на ЛитРес.
Безопасно оплатить книгу можно банковской картой Visa, MasterCard, Maestro, со счета мобильного телефона, с платежного терминала, в салоне МТС или Связной, через PayPal, WebMoney, Яндекс.Деньги, QIWI Кошелек, бонусными картами или другим удобным Вам способом.
Интервал:
Закладка:
Похожие книги на «Кто есть кто в робототехнике. Выпуск I. Компоненты и решения для создания роботов и робототехнических систем»
Представляем Вашему вниманию похожие книги на «Кто есть кто в робототехнике. Выпуск I. Компоненты и решения для создания роботов и робототехнических систем» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




Обсуждение, отзывы о книге «Кто есть кто в робототехнике. Выпуск I. Компоненты и решения для создания роботов и робототехнических систем» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.