Евгений Ружицкий - Американские самолеты вертикального взлета
Здесь есть возможность читать онлайн «Евгений Ружицкий - Американские самолеты вертикального взлета» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Год выпуска: 2000, Жанр: Технические науки, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Американские самолеты вертикального взлета
- Автор:
- Жанр:
- Год:2000
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Американские самолеты вертикального взлета: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Американские самолеты вертикального взлета»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Перевод не всегда точен в терминах. Например, общепринятый термин "авторотация" переведен как "самовращение". Невысокое качество скана - лучшее из найденных в сети.
Американские самолеты вертикального взлета — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Американские самолеты вертикального взлета», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Крыло прямое, высокорасположенное, неразрезное, имеет постоянную хорду 1,56 м. Относительное удлинение 6,12. Для предотвращения ударов лопастями на самолетном режиме имеет угол обратной стреловидности 6°30. Угол поперечного V=2°r угол установки 3 . В конструкции крыла используется усовершенствованный профиль NACA 64А-223. Панели обшивки слоистой сотовой конструкции, толщиной 19 мм. Механизация крыла состоит из односекционных закрылок и элеронов-закрылок. Закрылки могут отклоняться на углы 20°, 40° и 75°, а элероны-закрылки - на 47°. При полете на режиме висения за счет максимального отклонения закрылок потери тяги винтов уменьшаются на 6%.
Поворотные винты трехлопастные. Лопасти изготовлены из нержавеющей стали и крепятся ко втулке из титанового сплава с помощью торсионов и осевых шарниров. Крепление втулки к валу двигателя полужесткое, с помощью эластомерного шарнира, допускающего отклонение плоскости вращения винта на 12° на вертолетном режиме полета. Винты не имеют тормозов, складывание лопастей не предусмотрено. Лопасти имеют постоянную хорду 0,355 м, относительная толщина лопасти у комля 28%, на конце - 8%, крутка лопасти 35°, угол конусности лопастей 2,5°, коэффициент заполнения винта 0,089.
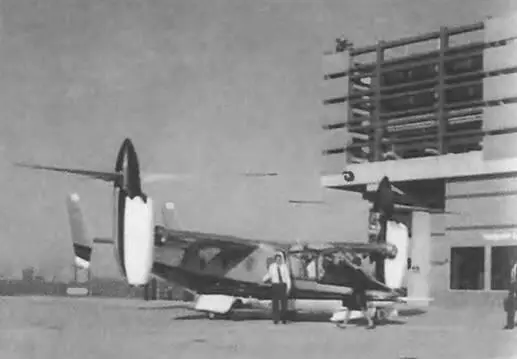
Демонстрация эксплуатации СВВП XV-15C вертолетной площадки на крыше здания
Окружная скорость концов лопастей на вертолетном режиме 225 м/с, на самолетном - 183 м/с. Масса лопасти 54,5 кг. Позже, в 1982 г., NASA и фирма «Белл» по контракту стоимостью 12,8 млн. долл. разработали и изготовили новые винты с лопастями из композиционных материалов на основе волокон графита. Лопасти имели крутку, увеличенную до 43°, корневую хорду 0,507 м и концевую 0,127 м. С новыми лопастями предполагалось увеличение статического потолка до 3050 м, максимальной взлетной массы до 6800 кг и скорости до 600 км/ч.
Оперение двухкилевое, цельнометаллическое. Размах стабилизатора 3,91 м. Вертикальные кили имеют рули направления, стабилизатор - рули высоты. Угол установки стабилизатора может меняться.
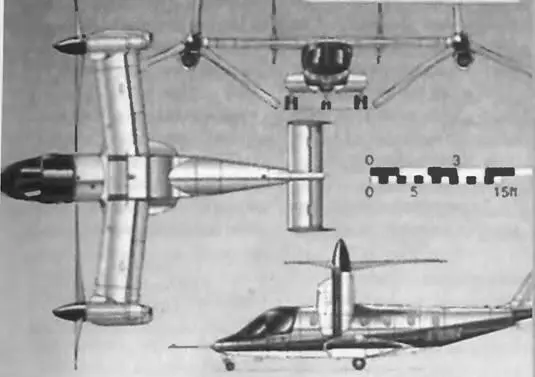
Схема СВВП XV-15
Шасси трехопорное, от канадского СВВП Канадэр CL-84. Все опоры имеют спаренные колеса. Передняя опора убирается назад, основные - вперед в обтекатели по бокам фюзеляжа. Шасси рассчитано на вертикальную скорость снижения 3,05 м/с. База шасси 4,8 м, колея 2,64 м.
Силовая установка. Турбовальные двигатели Лайкоминг LTC1K-4K с передним выводом вала установлены в гондолах на концах крыла. Двигатель LTC1K-4K является модификацией вертолетного ГТД Лайкоминг T-53-L-13 и рассчитан на работу при различных углах поворота гондолы.. ГТД имеет осецентробежный компрессор, кольцевую противоточную камеру сгорания, осевую турбину компрессора и одноступенчатую силовую турбину. Масса сухого двигателя 234 кг (без сопловой трубы), длина двигателя 1,21 м, максимальный диаметр 0,58 м. Удельный расход топлива 0,234 кг/л. с.-ч. Воздухозаборники ГТД снабжены противообледенительной системой.

Кабина и оборудование СВВП XV-15
Топливная система. Топливо расположено в двух крыльях баках-отсеках общей вместимостью 870 л. Масса масла 62 кг. Трансмиссия имеет два промежуточных и два основных редуктора (по одному для каждого двигателя), проходящий в крыле синхронизирующий вал и центральный редуктор. Синхронизирующий вал обеспечивает привод винтов при отказе одного ГТД. Поворот гондол осуществляется с помощью винтовых домкратов. Винты могут отклоняться от горизонтального положения на угол 95°. При взлете с коротким разбегом угол поворота винтов равен 60 - 75°. Переход самолета от полета на режиме висения к горизонтальному полету может быть выполнен за И-12с.
Система управления бустерная, с гидравлическим приводом, дублированная. При полете на вертолетных режимах самолет управляется с помощью рычага «шаг-газ» и ручки управления циклическим шагом винтов. В крейсерском полете поперечное управление осуществляется с помощью элеронов-закрылок (флаперонов), путевое - с помощью рулей направления, а продольное - рулей высоты. Рули могут использоваться и на вертолетных режимах при соответствующей скорости. Самолет оснащен двумя автоматическими системами управления: трехосевой системой SCAS управления и повышения устойчивости и системой FFS с использованием механизмов загрузки.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Американские самолеты вертикального взлета»
Представляем Вашему вниманию похожие книги на «Американские самолеты вертикального взлета» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




Обсуждение, отзывы о книге «Американские самолеты вертикального взлета» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.