Вертолет 2002 03
Здесь есть возможность читать онлайн «Вертолет 2002 03» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Год выпуска: 2002, Жанр: sci_transport, periodic, military_weapon, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Вертолет 2002 03
- Автор:
- Жанр:
- Год:2002
- ISBN:нет данных
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Вертолет 2002 03: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Вертолет 2002 03»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Вертолет 2002 03 — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Вертолет 2002 03», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
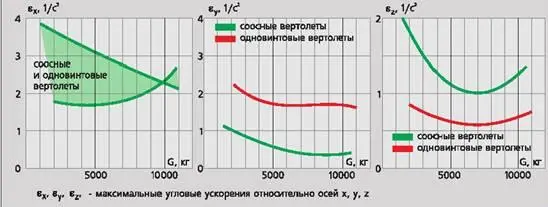
Рис 7. Максимальны* располагаемые ускорения соосных и одновинтовых вертолетов
Максимально допустимые скорости полета вбок и назад тоже характеризуют маневренность, так как в итоге определяют быстроту перемещения вертолета из одной точки в другую, что особенно важно в условиях боя. Скорость перемещения соосного вертолета в любом направлении с режима висения ограничивается только максимальными располагаемыми ходами в системе управления винтами. На одновинтовом вертолете наличие рулевого винта накладывает существенное ограничение на скорость перемещения вбок с режима висения вследствие возможности попадания рулевого винта в режим вихревого кольца.
Следует особо остановиться на криволинейных маневрах в горизонтальной плоскости. Здесь необходимо отметить возможность выполнения на соосных вертолетах принципиально нового маневра – «воронки» (рис. 8). Тактический смысл применения «воронки» заключается в том, что при ее выполнении вертолет может длительное время держать в зоне прицеливания наземные цели и производить по ним стрельбу, несмотря на отрицательный угол тангажа. На одновинтовом вертолете выдерживание отрицательного угла тангажа приводит к разгону, уходу от цели и новым заходам на нее, что снижает вероятность поражения цели.
«Воронка» – это сугубо боевой маневр, который выполняется на скорости 100-180 км/ч с отрицательным углом тангажа до 30-35° и, по существу, является боковым виражом, при котором углы крена и тангажа меняются местами. При выполнении маневра составляющая тяги винта, параллельная горизонтальной плоскости, направлена к центру «воронки». Эта сила уравновешивается инерционными силами, возникающими при движении вертолета по траектории, близкой к круговой с углом скольжения 90°. Таким образом, выполнение «воронки» на соосном вертолете основано на его способности совершать глубокие скольжения и перемещения вбок с большими скоростями.
Боевым маневром, который применяется для быстрого изменения направления движения, является и форсированный вираж. Он может быть эффективен при атаке наземных целей и в воздушном бою при атаке на встречных курсах (см. рис. 5). На соосных вертолетах обеспечивается существенно большая интенсивность выполнения форсированных виражей. Это объясняется отсутствием ограничений по угловой скорости вращения и возможностью выполнения форсированного виража с глубоким (до 60°) скольжением. Этими возможностями соосный вертолет обладает благодаря отсутствию рулевого винта.
Соосные вертолеты имеют преимущества и при выполнении всех пространственных маневров, особенно при выполнении маневров типа поворота на «горке», когда необходимо развивать большие угловые скорости и использовать глубокие скольжения.
Кроме вышеперечисленных маневров, на соосных вертолетах успешно выполняются такие фигуры высшего пилотажа, как косая петля, кувырок, восходящая бочка и др. При их выполнении на соосных машинах углы тангажа достигают 90°, крены – 130-140°.
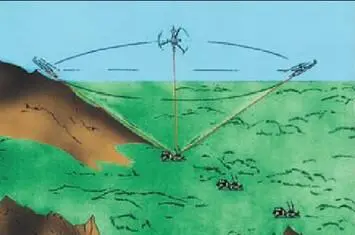
Рис. 8. Боевой маневр «воронка»
Анализ статистических материалов, полученных на основе летных испытаний, показывает, что при одинаковой нагрузке на квадратный метр ометаемой несущим винтом площади минимальные вертикальные скорости снижения на режиме авторотации у соосных вертолетов несколько меньше, чем у одновинтовых вертолетов. Это объясняется наличием на соосной несущей системе бипланового эффекта, уменьшающего индуктивные потери мощности. Кроме того, на режиме авторотации, несмотря на малую тягу, рулевой винт одновинтового вертолета потребляет определенную мощность, что также приводит к увеличению вертикальной скорости снижения одновинтовых вертолетов.
Сравнение показывает, что минимальная вертикальная скорость боевого соосного вертолета, имеющего нагрузку на ометаемую площадь 57 кгс/м² , на 8-10% больше, чем вертикальная скорость одновинтового вертолета с нагрузкой 43 кгс/м². Однако на посадочных характеристиках вертолетов эта разница не сказывается по следующим причинам:
– благодаря аэродинамической симметрии соосного вертолета, отсутствию в каналах управления перекрестных связей типа «общий шаг – педали» не происходит существенной разбалансировки машины в пространстве при переходе от моторного полета на режим авторотации;
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Вертолет 2002 03»
Представляем Вашему вниманию похожие книги на «Вертолет 2002 03» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.


Обсуждение, отзывы о книге «Вертолет 2002 03» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.