Вертолет 2002 03
Здесь есть возможность читать онлайн «Вертолет 2002 03» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Год выпуска: 2002, Жанр: sci_transport, periodic, military_weapon, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Вертолет 2002 03
- Автор:
- Жанр:
- Год:2002
- ISBN:нет данных
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Вертолет 2002 03: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Вертолет 2002 03»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Вертолет 2002 03 — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Вертолет 2002 03», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Благодаря аэродинамической симметрии на соосном вертолете практически отсутствуют связи между продольным и боковым движением, обеспечивается независимость каналов управления и простота пилотирования. Управление таким вертолетом доступно летчикам средней квалификации.
Аэродинамическая симметрия в значительной степени меняет «лицо» вертолета. Отсутствие переменного (по режимам полета) момента рыскания и боковой силы, действующих на фюзеляж, улучшает характеристики устойчивости и управляемости, повышает безопасность полета и облегчает решение боевых задач в экстремальных условиях. На соосном вертолете отсутствуют связи между изменением мощности двигателей (общим шагом винтов) и путевым и поперечным управлением. На одновинтовом вертолете все маневры, в процессе которых меняется режим работы двигателей (разгоны и торможения, изменения высоты полета, «горки» и пикирования, боевые развороты и др.), сопровождаются путевой перебалансировкой и необходимостью парирования возникающих боковых сил креном и скольжением. Из-за отсутствия симметрии, постоянного изменения взаимосвязи между движением в вертикальной и горизонтальной плоскостях пилотирование одновинтового вертолета усложняется, что требует большей тщательности обучения.
Соосные вертолеты по простоте управления сопоставимы с самолетами для первоначального обучения. В то же время по летным характеристикам устойчивости, управляемости и маневренности они имеют превосходство над одновинтовыми вертолетами.
«Полет на соосном вертолете не составляет труда и, по существу, выполняется так же рефлекторно, как и ходьба, высвобождая все человеческие ресурсы для решения тактической задачи», – писал Заслуженный летчик-испытатель, Герой Советского Союза Н.П. Бездетное. Лучше об управляемости вертолета соосной схемы, наверно, не скажешь.
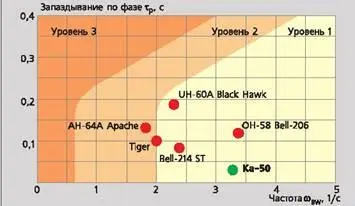
Рис 3. Уровни управляемости вертолетов на висении и в полете с малой скоростью
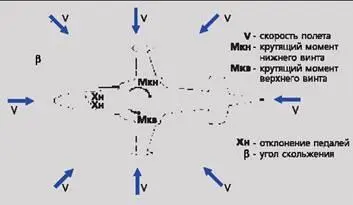
Рис 4. Независимостъ функционирования системы управения от угла скольжения
В процессе маневрирования решаются две задачи: выход на заданное направление и обеспечение требуемой разности высот по отношению к цели. Конечно, на практике эти задачи решаются в комплексе, но для лучшего понимания физической природы явлений рассмотрим их раздельно.
Маневры с изменением направления движения могут быть выполнены как под действием перегрузки (об этом мы поговорим отдельно), так и без нее. Маневры, при которых продольная ось вертолета ориентируется в заданном направлении, как правило, путем ввода вертолета в глубокое скольжение, называются «плоскими». Специфическая особенность вертолета – способность производить «плоские» развороты, реализуемая на висении и при перемещениях с малыми скоростями полета. Наиболее известным «плоским» маневром является разворот вертолета по курсу на режиме висения. Нужно отметить, что интенсивность современного боя и необходимость достижения тактического превосходства в боевой обстановке требуют расширения диапазона скоростей полета, на которых может быть использован «плоский» маневр.
Благодаря своим конструктивным особенностям соосный вертолет имеет неограниченные возможности в реализации «плоского» разворота, превосходящие возможности одновинтовых вертолетов. Особенности конструкции обеспечивают концентрацию на соосном винте всех важнейших функций: создание подъемной и пропульсивной (движущей) силы, продольного, поперечного и путевого управления и управления общим шагом.
Путевое управление вертолетом с соосным несущим винтом осуществляется при использовании разницы моментов вращения на верхнем и нижнем винтах (рис. 4). Это приводит к тому, что система управления в целом становится практически независимой от угла скольжения. Именно эго обстоятельство, а также отсутствие рулевого винта позволяет соосному вертолету выполнять «плоский» разворот с большими углами скольжения.
Для одновинтового вертолета «плоский» разворот принципиально невозможен. На одновинтовом вертолете допустимые углы скольжения существенно ограничиваются наличием рулевого винта. Дело в том, что изменение угла скольжения приводит к изменению угла атаки рулевого винта, условий его работы и махового движения его лопастей, особенно на больших скоростях полета. Увеличение амплитуды махового движения лопастей рулевого винта сверх допустимой является прямой угрозой безопасности полета. Это обусловлено тем, что на рулевых винтах отсутствуют автоматы перекоса, а предотвращение чрезмерного роста амплитуды махового движения обеспечивается только регулятором взмаха, возможности которого ограничены. Поэтому при росте амплитуды махового движения сверх допустимой возможны удары лопастей рулевого винта о балку. Кроме того, с ростом амплитуды махового движения растут нагрузки в элементах конструкции рулевого винта, что также накладывает ограничения на углы скольжения.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Вертолет 2002 03»
Представляем Вашему вниманию похожие книги на «Вертолет 2002 03» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.


Обсуждение, отзывы о книге «Вертолет 2002 03» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.