Вертолет, 2004 №1
Здесь есть возможность читать онлайн «Вертолет, 2004 №1» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Год выпуска: 2004, Жанр: sci_transport, periodic, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Вертолет, 2004 №1
- Автор:
- Жанр:
- Год:2004
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Вертолет, 2004 №1: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Вертолет, 2004 №1»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Вертолет, 2004 №1 — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Вертолет, 2004 №1», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Очередная трагедия над Северным морем, произошедшая с вертолетом Boing-234 Chinook в 1986 году и унесшая жизни почти 100 человек, заставила форсировать работы по созданию системы и расширить их фронт. Причиной катастрофы стал выход из строя главного редуктора из-за трещины зубчатой передачи. Проведенные исследования выявили причины быстрого распространения трещины и подтвердили необходимость создания системы, которая позволяла бы определять в нужное время наличие трещины и отслеживать динамику ее распространения.
САА включило в работу по созданию системы фирму Marconi Electronic System (разработчик электроники) и фирму-эксплуатанта Bristow Helicopters. Работа шла параллельно с использованием ноу-хау Teledyne/Steward Hughes. Новая разработка получила название IHUMS, хотя по функциональным особенностям аналогична HUMS фирмы Teledyne/Steward Hughes.
Между 1987 и 1991 годами были проведены два рабочих испытания HUMS на вертолетах, эксплуатировавшихся над Северным морем. Финансировали их САА, Британская ассоциация операторов морских установок и Управление энергетики и транспорта. Испытания HUMS на вертолете AS.332L Super Рита проводились совместно компаниями BHL, Smith Industries, MJA Dynamics, Westland Helicopters Snstoiv, на вертолете S-61N — BHL, Steward Hughes, Hawker Siddeiey Dynamics.
В июле 1991 году IHUMS, установленная на борту вертолета S-61N компании Sfkorsfcy, получила сертификат САА. Это была первая система мониторинга работоспособности и использования в мире, получившая сертификат. Таким образом, с момента выпуска фирмой Steward Hughes первого готового продукта — системы MSDA — до установки на вертолет первой сертифицированной системы HUMS прошло 9 лет.
С появлением HUMS связано решение о введении в систему в обязательном порядке регистратора полетных данных в той конфигурации, в какой он разработан: для HUMS это блок FDR как составная часть системы. САА установило, что вертолеты гражданского назначения с максимальным весом более 2730 кг (или перевозящие более 9 пассажиров) должны быть оснащены FDR с 1 февраля 1991 года. Подобные требования были введены И октября 1991 года и Федеральным управлением авиации США.
В самом общем виде HUMS можно представить как систему, состоящую из датчиков и компьютеров и включающую в себя программное обеспечение и аналитические методы, которые все вместе позволяют регистрировать уровни вибраций и другие параметры для обеспечения контроля и оценки состояния систем и агрегатов вертолета. При характеристике этой системы важно знать ее конфигурация, поскольку она определяет перечень функций, выполняемых конкретной системой. Самые первые системы разработки Teiedyne/Steward Hughes и Marconi/Bristow Helicopters состояли из бортовой и наземной частей. Они выполняли следующие функции на борту:
— мониторинг состояния редуктора и трансмиссии;
— мониторинг состояния» ресурса и эксплуатационных характеристик двигателя;
— контроль положения лопастей и дисбаланса винта;
— регистрация полетных данных (блок FDR);
— запись переговоров в кабине экипажа (блок CVR);
и следующие на наземной станции:
— обмен данными в операционной среде;
— взаимодействие с пилотом (до и после полета);
— осуществление поддержки технического обслуживания (расшифровка показаний датчиков, корректировка положения лопастей и балансировка винта);
— учет ресурса деталей;
— анализ и хранение исходных сигналов и результатов обработки.
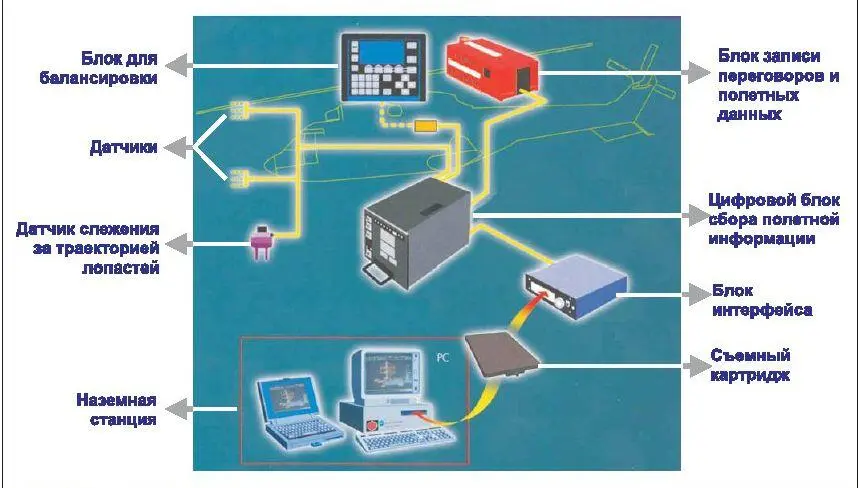
Рис. 1. Общая схема системы HUMS
На рис. 1 показана общая схема такой системы.
Интеграция FDR и CVR в HUMS предпринимается из следующих соображений. Во- первых, такая система экономически выгодна в целом, поскольку исключает необходимость установки дополнительных, периферийных систем. Во-вторых, такая интеграция удобна эксплуатанту, так как ограничивает количество поставщиков, участвующих в оборудовании вертолета. HUMS такой конфигурации называется полнофункциональной. Однако время постоянно вносит свои коррективы, и к настоящему времени уже разработаны и выпускаются системы с более широкими, по сравнению с перечисленными, функциональными возможностями.
Сегодня созданием HUMS занимается целый ряд зарубежных фирм. Наиболее известными из них являются Teledyne/ Steward Hughes, GEC Marconi/Brigtow, BF Goodritch, Eurocopter, Chedwick Helmuth, Howcle Instruments. Systems amp; Electronics, Inc (SEI), Signal Processing Systems, Smith Industries, AMS, WTI, RSL Electronics LTD u другие.
В полной конфигурации системы до конца 90-х годов выпускали только фирмы Teledyne/Steward Hughes и GEC Marconi/ Brigtow (хотя системы этой фирмы и назывались системами полной конфигурации, однако не выполняли обработку данных в реальном времени, ограничиваясь лишь наземной обработкой данных, зарегистрированных на борту).
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Вертолет, 2004 №1»
Представляем Вашему вниманию похожие книги на «Вертолет, 2004 №1» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.


Обсуждение, отзывы о книге «Вертолет, 2004 №1» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.