Владимир Фетисов - Беспилотная авиация - терминология, классификация, современное состояние
Здесь есть возможность читать онлайн «Владимир Фетисов - Беспилотная авиация - терминология, классификация, современное состояние» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Уфа, Год выпуска: 2014, ISBN: 2014, Издательство: ФОТОН, Жанр: sci_transport, Справочники, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Беспилотная авиация: терминология, классификация, современное состояние
- Автор:
- Издательство:ФОТОН
- Жанр:
- Год:2014
- Город:Уфа
- ISBN:978-5-9903144-3-6
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Беспилотная авиация: терминология, классификация, современное состояние: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Беспилотная авиация: терминология, классификация, современное состояние»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Беспилотная авиация: терминология, классификация, современное состояние — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Беспилотная авиация: терминология, классификация, современное состояние», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
1.3.2. Планирование действий БАК
Хотя полезная нагрузка современных БПЛА может иметь самое разнообразное назначение, основной задачей при управлении функционированием БАК является планирование траекторий полета и пилотирование БПЛА по этим траекториям. С учетом того, что БАК имеет в своем составе, как правило, не один, а два и более БПЛА, а многие небольшие комплексы (включая пункты управления) мобильны, то возникает задача планирования действий нескольких подвижных компонентов.
Задачи первого типа в настоящее время хорошо проработаны, существует большое количество систем автоматического управления, управляющих как подсистемами, так и целыми БПЛА в программных и командных режимах [67]. Ко второму типу относятся принципиально иные задачи, и в первую очередь, задача планирования групповых действий мобильных объектов, суть которой заключается в определении действий каждого объекта в составе группы для достижения поставленной перед БАК цели.
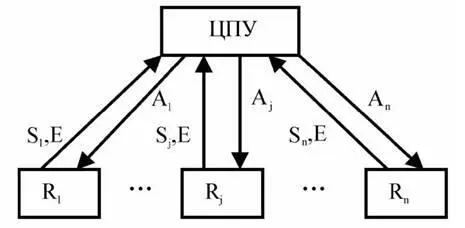
Один из подходов к решению такой задачи – представить весь комплекс как единый объект управления. В этом случае каждый компонент должен постоянно передавать в центральный процессорный узел (ЦПУ) информацию о своем текущем состоянии и текущем состоянии окружающей его среды [68]. На основе этой информации ЦПУ определяет текущие действия компонентов и передает команды на выполнение этих действий на их исполнительные системы (рис. 1.85, а).
Такой метод реализуется в настоящее время в глобальных станциях управления. Постоянная связь между всеми компонентами осуществляется через глобальные спутниковые системы. Координаты всех управляемых БПЛА (оснащенных аппаратурой спутниковой связи) непрерывно отслеживаются, а командные сигналы управляющей платформы транслируются на них. Таким образом, созвездие спутников выступает в роли двустороннего канала связи между управляющим и управляемыми компонентами.
а
б
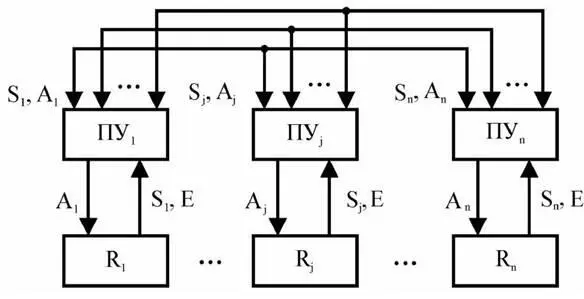
Рис. 1.85. Варианты структур системы планирования действий БАК: а) централизованная, б) распределенная;
R j,j = 1,n – подвижные компоненты комплекса; Е – окружающая среда; S jи A j– вектор-функции, описывающие текущее состояние и действия j -го компонента соответственно
Очевидно, что направление дальнейшего развития систем такого типа имеет преимущественно военное (государственное) значение. Соответственно, трудности решения многомерной задачи по управлению п мобильными объектами будут возложены на вычислительную машину, обладающую высочайшим быстродействием (и стоимостью), что трудно реализуемо в гражданских областях. При этом отметим так же, что сбои в работе центральной вычислительной машины или серьезные помехи, нарушающие связь объектов управления со спутниками могут повлечь за собой потерю контроля над управляемыми БПЛА.
Хорошим примером является единая автоматизированная система одновременного управления несколькими типами БПЛА ZaNET, разработанная компанией ZALA AERO (г. Ижевск), обеспечивает возможность пользователю управлять множеством БПЛА с любой точки земли (рис. 1.86). Использование системы целесообразно, когда место запуска БПЛА и место получения целевой информации с борта и управление им необходимо географически разнести.
ZaNET представляет собой единую автоматизированную систему управления тактическим БАК с возможностью интеграции в общую систему управления войсковыми соединениями.
Платформа позволяет управлять несколькими типами БПЛА одновременно, при этом отдельная оперативная группа посредством наземной станции управления (НСУ) может получать информацию (видео/фото) от беспилотных аппаратов, выполняющих полетное задание в другом районе и управляемых с другой НСУ, централизованно анализируя поступающую информацию для принятия оперативных решений. При этом НСУ интегрируется в сеть как сервер с защищенным доступом.
Все БПЛА и наземные станции управления связаны между собой посредством Ethemet-радиоканала связи. Также доступно удаленное управление БПЛА с разделением прав пользователей [69].
Другим примером является проект SMAVNET (Swarming Micro Air Vehicle Network) швейцарского института EPFL в г. Лозанне [70]. Он посвящен созданию управляемых групп согласованно работающих малых беспилотных самолетов, которые могут обмениваться информацией между собой по протоколу ZigBee (рис. 1.87).
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Беспилотная авиация: терминология, классификация, современное состояние»
Представляем Вашему вниманию похожие книги на «Беспилотная авиация: терминология, классификация, современное состояние» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.


Обсуждение, отзывы о книге «Беспилотная авиация: терминология, классификация, современное состояние» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.