Владимир Фетисов - Беспилотная авиация - терминология, классификация, современное состояние
Здесь есть возможность читать онлайн «Владимир Фетисов - Беспилотная авиация - терминология, классификация, современное состояние» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Уфа, Год выпуска: 2014, ISBN: 2014, Издательство: ФОТОН, Жанр: sci_transport, Справочники, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Беспилотная авиация: терминология, классификация, современное состояние
- Автор:
- Издательство:ФОТОН
- Жанр:
- Год:2014
- Город:Уфа
- ISBN:978-5-9903144-3-6
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Беспилотная авиация: терминология, классификация, современное состояние: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Беспилотная авиация: терминология, классификация, современное состояние»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Беспилотная авиация: терминология, классификация, современное состояние — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Беспилотная авиация: терминология, классификация, современное состояние», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:

Рис. 1.86. Автоматизированная система ZaNET, предназначенная для одновременного управления несколькими типами БПЛА
Управление этими летающими роботами осуществляется централизованно; т.е. с наземного пункта управления команда передается на один из БПЛА, а затем она распространяется в "стае" благодаря локальной сети. На каждом самолете установлена мобильная платформа Toradex Colibri РХА270, а в качестве операционной системы используется Linux.
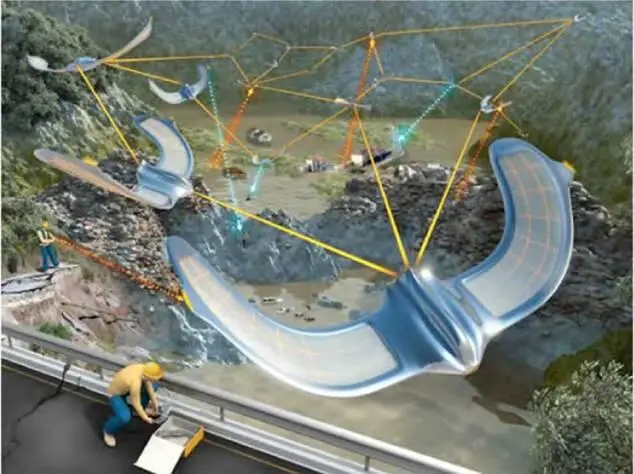
Рис. 1.87. SMAVNET – система управления "стаей" БПЛА на основе протокола ZigBee
К этому же классу централизованных управляемых систем можно отнести большую часть других часто упоминаемых в иностранной литературе "стай" (swarms). Часто в таких системах функцию ЦПУ выполняет смартфон или ноутбук [71]. Подобные примеры демонстрируют наряду с самой возможностью управления несколькими малоразмерными БПЛА с помощью одного портативного устройства проблему нехватки алгоритмического обеспечения для таких групповых полетов.
Существует другой подход планирования действий комплекса: каждый компонент должен самостоятельно решать задачу планирования своих действий на основе информации о текущей ситуации в среде, текущих состояниях и действиях других компонентов комплекса на небольшой интервал времени вперед [68].
Такой метод коллективного планирования действий может быть реализован с помощью распределенной (децентрализованной) системы, в которой каждый компонент R jобладает своим процессорным узлом ПУ j(рис. 1.85, б). Процессорные узлы всех компонентов комплекса связаны между собой информационными каналами по принципу «каждый с каждым», по которым передается информация о текущих состояниях Ј • остальных компонентов и выбираемых ими действиях.
Такой подход ориентирован на управление группой однотипных объектов, стремящихся выполнить одну общую цель. Объединение информационно-управляющих комплексов нескольких БПЛА в единую сеть позволяет производить комплексную обработку всей получаемой информации, а распределенная структура системы повышает ее надежность [72]. Один из обязательных принципов траекторного управления такой группой состоит в соблюдении некоторых установленных дистанций между управляемыми БПЛА, как и то, что все они являются взаимозаменяемыми с точки зрения достижения поставленной перед комплексом цели. В более сложных ситуациях (различные БПЛА и закономерности их взаимодействия друг с другом) требуется более сложная система управления комплексом [73].
1.3.3. Система управления БАК
Всю систему автоматического управления авиационным комплексом (АК) можно представить в виде иерархической структуры, показанной на рис. 1.89. Здесь стрелками показаны сигналы: управляющие (сверху вниз) и информационные (снизу вверх). На рисунке показаны три уровня автоматического управления АК и модели, используемые при формировании управляющих воздействий, а также верхний уровень управления, всю работу на котором выполняет человек-оператор. Следует отметить, что оператор, как правило, имеет возможность управлять любым из низлежащих уровней, задавая:
– текущую задачу для СУАК;
– действие для конкретного БПЛА;
– требуемое значение какого-либо параметра состояния БПЛА.
При этом всю необходимую информацию о состоянии компонентов БАК (помимо визуальной из окружающего пространства) оператор получает через средства отображения информации (СОИ), как правило, входящие в состав СУАК.
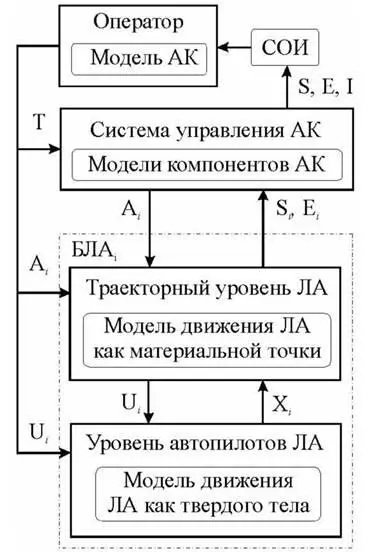
Рис. 1.89. Уровни управления авиационным комплексом
На уровне оператора используется модель авиационного комплекса, включающая описание:
– задач, которые способен выполнять комплекс;
– условий применения и областей достижимости АК;
– имеющихся ЛA, их полезной нагрузки и центральной системы управления комплексом;
– коммуникаций между компонентами комплекса.
Модель АК как средства для решения некоторого множества задач можно представить следующим образом:
Mod (1) = {T,E,R}, (1.1)
где Т =(Т 1,Т 2 …,Т q) – множество задач, выполняемых комплексом;
Е = (Е 1, Е 2 ..., E j)– параметры состояния окружающей среды (условия применения комплекса);
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Беспилотная авиация: терминология, классификация, современное состояние»
Представляем Вашему вниманию похожие книги на «Беспилотная авиация: терминология, классификация, современное состояние» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.


Обсуждение, отзывы о книге «Беспилотная авиация: терминология, классификация, современное состояние» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.