В. Яценко - Твой первый квадрокоптер - теория и практика
Здесь есть возможность читать онлайн «В. Яценко - Твой первый квадрокоптер - теория и практика» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Санкт-Петербург, Год выпуска: 2016, ISBN: 2016, Издательство: БХВ-Петербург, Жанр: sci_radio, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Издательство:БХВ-Петербург
- Жанр:
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Твой первый квадрокоптер: теория и практика: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Твой первый квадрокоптер: теория и практика»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Твой первый квадрокоптер: теория и практика», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
В общем виде система телеметрии коптера состоит из следующих компонентов: набор датчиков и прочих источников информации; бортовой модуль телеметрии, который обрабатывает исходные данные и "упаковывает" их в непрерывный поток данных; радиоканал для передачи данных на землю; устройство для приема и отображения данных; устройство записи данных в лог.
В практической реализации телеметрии возможны различные варианты. В классической и самой простой схеме сбор и обработку данных осуществляет полетный контроллер. Далее, через последовательный порт он передает поток данных на специальный модуль OSD (On-Screen Data — будет рассмотрен далее), который накладывает цифробуквенные и графические элементы на изображение бортовой видеокамеры, которое на земле отображается в видеоочках оператора или на дисплее.
Иногда датчики тока и напряжения и приемник GPS подключают непосредственно к модулю OSD. Запись лога данных может вестись во встроенную память полетного контроллера, в память модуля телеметрии, в специальный логгер, в наземный компьютер либо путем записи полетного видео. Лог бывает полезен при анализе максимального потребляемого тока, поиске просадок питающего напряжения, выявлении сбоев канала управления и т. д.
Телеметрийная информация может передаваться непосредственно с полетного контроллера при помощи специального радиомодема — оборудования, обеспечивающего двустороннюю связь по протоколу UART через радиоканал.
И, наконец, телеметрия может передаваться на землю при помощи аппаратуры радиоуправления двустороннего действия, с отображением данных на дисплее пульта управления. Это вариант удобный, но не самый дешевый, особенно если учесть, что для полетов по видеокамере все равно понадобится еще и телеметрия на экране. Окончательный выбор варианта и практическая реализация зависят только от потребностей и возможностей владельца коптера, поэтому нельзя однозначно сказать, что лучше.
Теперь разберемся подробнее, что является источником данных для телеметрии.
Датчик напряженияпредставляет собой простейший делитель напряжения из двух постоянных резисторов. Напряжение с выхода делителя поступает на аналоговый вход микроконтроллера, который при помощи встроенного АЦП измеряет напряжение. Делитель необходим, т. к. на вход микроконтроллера категорически нельзя подавать напряжение батареи напрямую. Это приведет к выходу микроконтроллера из строя. Как минимум, будет испорчен этот аналоговый вход.
Датчик токаустроен несколько сложнее. Это либо низкоомный шунт — мощный резистор с очень низким сопротивлением, включенный последовательно в разрыв силовой цепи, либо датчик Холла, реагирующий на напряженность магнитного поля, возникающего вокруг силового провода. В том и другом случае требуется дополнительная схема, операционный усилитель, усиливающий слабый сигнал датчика.
Существуют готовые измерительные модули. Пример такого модуля изображен на рис. 3.8. Этот модуль кроме резистивного делителя напряжения и токового шунта содержит импульсный источник с выходным напряжением 5,25 В и током 3 А для питания бортовой электроники.
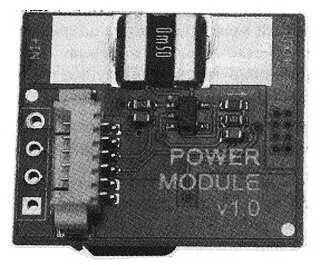
Рис. 3.8. Модуль для измерения напряжения и тока силовой батареи.
Датчики тока и напряжения имеют погрешности, вызванные разбросом параметров элементов, поэтому их показания корректируют программно, при помощи калибровочных констант, которые необходимо один раз подобрать при настройке коптера.
На основании текущей продолжительности полета, напряжения и тока система телеметрии может рассчитать количество потребленной от батареи энергии в миллиампер-часах. Иногда этот параметр более информативен, чем просто текущее напряжение батареи, потому что позволяет знать, сколько батарея "отдает" на самом деле, в отличие от надписи на этикетке, и приблизительно оценить оставшееся время полета.
Датчик температурыприменяется нечасто, в основном в мощных квадрокоптерах с большим энергопотреблением, когда силовая батарея может работать в критических режимах. В качестве датчика может использоваться терморезистор или термодиод, меняющие сопротивление в зависимости от температуры, а также интегральный термометр, подключаемый к модулю телеметрии по шине I 2С или I-Wire.
Барометр, акселерометр и компас,как правило, используются штатные, установленные на плату полетного контроллера. Полетный контроллер транслирует полученные и обработанные данные в модуль телеметрии.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Твой первый квадрокоптер: теория и практика»
Представляем Вашему вниманию похожие книги на «Твой первый квадрокоптер: теория и практика» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




![Надежда Поврозник - Исторические информационные системы - теория и практика [litres]](/books/429962/nadezhda-povroznik-istoricheskie-informacionnye-sist-thumb.webp)






Обсуждение, отзывы о книге «Твой первый квадрокоптер: теория и практика» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.