В. Яценко - Твой первый квадрокоптер - теория и практика
Здесь есть возможность читать онлайн «В. Яценко - Твой первый квадрокоптер - теория и практика» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Санкт-Петербург, Год выпуска: 2016, ISBN: 2016, Издательство: БХВ-Петербург, Жанр: sci_radio, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Издательство:БХВ-Петербург
- Жанр:
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Твой первый квадрокоптер: теория и практика: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Твой первый квадрокоптер: теория и практика»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Твой первый квадрокоптер: теория и практика», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Поэтому, по мнению автора, в данном случае разнообразие протоколов скорее зло, чем благо. Кроме того, модули U-BLOX даже версии 7 не поддерживают одновременную работу с системами GPS и ГЛОНАСС, режимы необходимо переключать программно.
В части II книги мы подробно рассмотрим пример настройки и подключения приемника U-BLOX NEO 6.
Адаптер Bluetooth— это простой и недорогой способ подключить к полетному контроллеру смартфон, планшет или нетбук, чтобы воспользоваться утилитами для настройки и телеметрии. Разумеется, ноутбук или обычный компьютер также можно подключать по беспроводному соединению. Этот вариант даже более предпочтителен, чем соединение проводом по USB. Если забыть отключить от контроллера провод после окончания работы, то можно получить вырванный с дорожками платы контроллера разъем mini-USB и серьезные трудности с последующим подключением.
В любительской практике обычно применяются очень дешевые и широко распространенные адаптеры версий НС-05, НС-06 (рис. 3.7), НС-07. Они представляют собой плату, на которой смонтированы одна или две микросхемы и печатная антенна. В свою очередь, эта плата припаяна на плату расширения, содержащую источник 3,3 В, светодиоды и разъем. Иногда в продаже попадаются "голые" платы модулей, но в этом случае вам придется самостоятельно подключать питание, светодиоды и разъем.
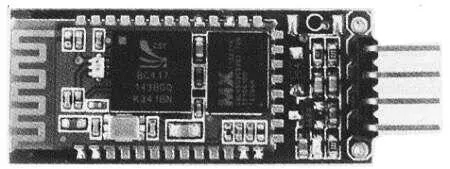
Рис. 3.7. Стандартный адаптер Bluetooth НС-06
К сожалению, обычные адаптеры Bluetooth не поддерживают процесс программирования контроллера, потому что не могут генерировать сигнал сброса контроллера, необходимый для запуска процесса. В продаже можно встретить специальный вариант адаптера, позволяющий прошивать контроллер через беспроводное соединение, но в несколько раз дороже обычного адаптера. Поэтому для записи прошивки все же лучше использовать проводное подключение USB.
При покупке следует обратить внимание на версию адаптера. Наиболее популярными, проверенными и простыми в эксплуатации являются адаптеры НС-06, но можно приобрести и другую версию. Адаптер должен работать в режиме ведомого (Slave), но иногда встречаются адаптеры, на фабрике жестко прошитые в режим ведущего (Master). Эти адаптеры содержат в названии букву "М", например НС-06М. Вы не сможете использовать такой адаптер без перепрошивки, что достаточно сложно для неподготовленного любителя. Существуют адаптеры, у которых режим Master/Slave можно переключить внешней командой конфигурации. Это, например, адаптеры НС-05.
Система телеметрии предназначена для передачи с борта важной технической информации в режиме реального времени, а также, при необходимости, записи этой информации в лог для последующего изучения. Состав этой информации зависит от назначения системы и потребностей оператора. В простейшем случае, когда полет происходит на небольшом удалении и коптер контролируется визуально, достаточно следить только за напряжением силовых батарей. При полете с управлением по видеокамере уже, как правило, необходимо контролировать дальность полета и уровень радиосигнала, чтобы не потерять связь, а также следить за напряжением батареи видеоканала.
На практике набор телеметрийной информации намного шире, и в него стараются включить максимум параметров. Разумеется, набор этих параметров определяется оборудованием квадрокоптера:
• напряжение батарей;
• потребляемый ток;
• температура батарей;
• режим работы полетного контроллера;
• время полета;
• высота;
• линейная скорость;
• вертикальное ускорение;
• показания акселерометров (крен);
• показания компаса;
• обороты двигателей;
• текущие координаты GPS;
• количество доступных спутников;
• дальность до "дома" и направление "домой".
Данные имеют разную практическую ценность. Например, обороты двигателей в режиме реального времени нужны только для отладки и настройки. Если один или два мотора работают с большей нагрузкой в тот момент, когда коптер висит горизонтально и неподвижно, это может означать дисбаланс коптера — смещение его физического центра масс в сторону.
Формировать поток данных для телеметрии может не только полетный контроллер. Большинство современных телеметрийных систем способно автономно обрабатывать показания датчиков тока, напряжения и температуры, и даже поток данных GPS. Нет принципиальной разницы в том, куда подключать датчики, но иногда бывает конструктивно удобнее и безопаснее подключить их непосредственно к модулю телеметрии. С другой стороны, нет нужды приобретать очень дорогой модуль логирования и телеметрии, оснащенный собственным барометром, компасом, акселерометрами, поскольку эти датчики все равно есть на плате полетного контроллера.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Твой первый квадрокоптер: теория и практика»
Представляем Вашему вниманию похожие книги на «Твой первый квадрокоптер: теория и практика» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




![Надежда Поврозник - Исторические информационные системы - теория и практика [litres]](/books/429962/nadezhda-povroznik-istoricheskie-informacionnye-sist-thumb.webp)






Обсуждение, отзывы о книге «Твой первый квадрокоптер: теория и практика» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.