В. Яценко - Твой первый квадрокоптер - теория и практика
Здесь есть возможность читать онлайн «В. Яценко - Твой первый квадрокоптер - теория и практика» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Санкт-Петербург, Год выпуска: 2016, ISBN: 2016, Издательство: БХВ-Петербург, Жанр: sci_radio, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Издательство:БХВ-Петербург
- Жанр:
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Твой первый квадрокоптер: теория и практика: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Твой первый квадрокоптер: теория и практика»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Твой первый квадрокоптер: теория и практика», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
• подвес оснащен независимым контроллером с акселерометрами и гироскопами, который отслеживает угловое положение камеры и компенсирует малейшие отклонения.
Первый вариант наиболее очевиден и экономичен, поскольку полетный контроллер уже оснащен необходимыми датчиками ускорений. При таком способе стабилизации отсутствует положительная обратная связь, возникающая вследствие избыточного отклика системы (раскачка). Но, с другой стороны, отсутствие обратной связи порождает высокие погрешности, особенно при быстрых и значительных отклонениях рамы. Быстродействие системы также невысоко, потому что полетный контроллер кроме расчета стабилизации решает множество других задач. Этот вариант системы стабилизации по умолчанию заложен в прошивки популярных полетных контроллеров.
Во втором случае контроллер подвеса по сложности и цене сопоставим с полетным контроллером и требует отдельной настройки параметров отклика под конкретную камеру. Но динамическая стабилизация камеры во втором случае заметно выше.
В качестве исполнительного механизма, вращающего привод, в простейшем случае используются сервомашинки, у которых также много недостатков: высокая погрешность, низкое время отклика, низкий крутящий момент, хрупкий редуктор, ограниченный угол поворота. Сервомашинки обычно применяются в первом варианте системы и подключаются, непосредственно к выводам полетного контроллера.
В последнее время для вращения подвеса применяют бесколлекторные двигатели специальной конструкции (по сути, шаговые двигатели) — рис. 3.3.
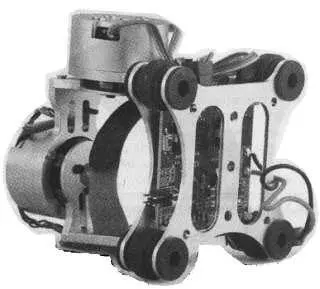
Рис. 3.3. Двухосевой подвес с собственным контроллером и бесколлекторным приводом
Они стоят заметно дороже обычных сервомашинок, хотя по цене совместимы с хорошими сервомашинками с металлическим редуктором. Некоторые владельцы коптеров изготавливают их самостоятельно, переделывая обычные бесколлекторные двигатели.
Бесколлекторные приводы нельзя подключать к выходам обычного полетного контроллера. Их используют в комплекте с независимым контроллером стабилизации подвеса или подключают к полетному контроллеру через специальный адаптер на основе микроконтроллера. Дополнительная сложность использования бесколлекторных приводов заключается в необходимости отслеживать действительный угол поворота камеры и иметь защиту от избыточного отклонения.
Видеопередатчик и видеоприемник
Передача видеосигнала в любительской практике обычно происходит в разрешенных диапазонах 2,4 и 5,8 ГГц. В последнее время оборудование видеоканала на 5,8 ГГц получает все большее распространение по причине малых габаритов и веса передающих модулей и антенн, а также снижения стоимости. Но сигнал на этой частоте сильнее подвержен затуханиям и отражениям. Как следствие, дальность надежной работы видеоканала на частоте 5,8 ГГц меньше и применяется он преимущественно на небольших коптерах и ближних дистанциях полетов (рис. 3.4). В более сложных случаях используется оборудование диапазона 2,4 ГГц и даже 900 МГц.
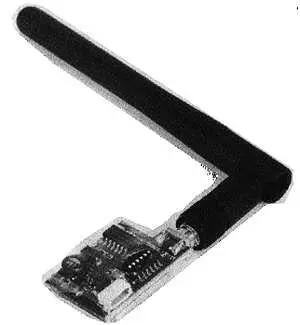
Рис. 3.4. Миниатюрный бортовой передатчик диапазона 5,8 ГГц
Видеопередатчик, как правило, поддерживает лишь несколько каналов (обычно восемь) в одном из частотных поддиапазонов (группе каналов). Рабочий канал устанавливается перемычкой или переключателем. Приемник в простейшем случае представляет собой готовый модуль, также работающий на одном из восьми каналов. Но рекомендуется сразу приобрести более сложный приемник, работающий на всех частотных поддиапазонах. Это обеспечит совместимость с передатчиками различных производителей. Таблица частот каналов приведена в приложении 2 .
Антенна бортового передатчика всенаправленная, обычно типа "клевер" или штыревая. В миниатюрных коптерах используются четвертьволновые штыревые антенны в виде отрезка провода. Наземный приемник может быть оснащен направленной или диверсифицированной антенной и системой слежения за источником сигнала ( см. разд. "Антенны" главы 2 ).
Если бортовая камера не оснащена функцией видеозаписи, то для записи изображения может использоваться наземный видеорекордер, подключаемый к выходу видеоприемника.
Видеомонитор и видеоочки
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Твой первый квадрокоптер: теория и практика»
Представляем Вашему вниманию похожие книги на «Твой первый квадрокоптер: теория и практика» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




![Надежда Поврозник - Исторические информационные системы - теория и практика [litres]](/books/429962/nadezhda-povroznik-istoricheskie-informacionnye-sist-thumb.webp)






Обсуждение, отзывы о книге «Твой первый квадрокоптер: теория и практика» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.