Грегори Гбур - Загадка падающей кошки и фундаментальная физика
Здесь есть возможность читать онлайн «Грегори Гбур - Загадка падающей кошки и фундаментальная физика» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2021, ISBN: 2021, Издательство: Альпина нон-фикшн, Жанр: Физика, Домашние животные, sci_popular, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Загадка падающей кошки и фундаментальная физика
- Автор:
- Издательство:Альпина нон-фикшн
- Жанр:
- Год:2021
- Город:Москва
- ISBN:978-5-0013-9363-4
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Загадка падающей кошки и фундаментальная физика: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Загадка падающей кошки и фундаментальная физика»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
В своей увлекательной и остроумной книге физик и заядлый кошатник Грегори Гбур показывает, как попытки понять механику падения кошек помогли разобраться в самых разных задачах в математике, физике, физиологии, неврологии и космической биологии, способствовали развитию фотографии и кинематографа и оказали влияние даже на робототехнику.
Поиск ответа на загадку падающей кошки погружает читателей в увлекательный мир науки, из которого они узнают решение головоломки, но также обнаружат, что феномен кошачьего выверта по-прежнему вызывает горячие споры ученых.
Автор убежден, что чем больше мы исследуем поведение этих животных, тем больше сюрпризов они нам преподносят.
Загадка падающей кошки и фундаментальная физика — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Загадка падающей кошки и фундаментальная физика», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
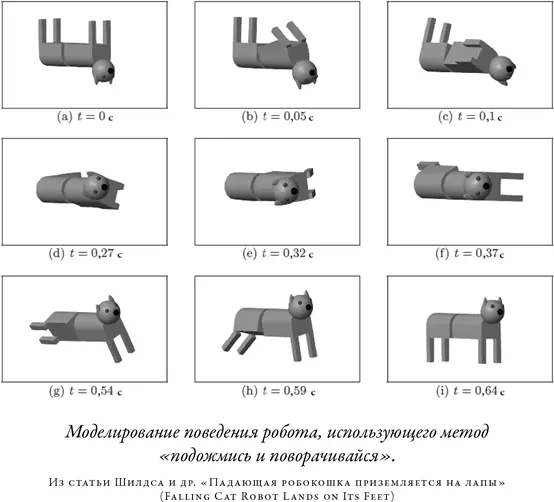
В 2014 г. группа Карен Лю из Технологического института Джорджии сумела построить по образцу кошки робота, способного динамически подправлять свое положение в воздухе, чтобы принять нормальную ориентацию. Внешне этот робот не слишком похож на кошку. Он построен в виде трех соединенных шарнирами секций, которые способны сгибаться независимо друг от друга и управлять ориентацией по Кауфману, при помощи неголономного планирования движения. Их робот был не готов к скорости и ударам реального свободного падения, поэтому исследователи испытывали его в скольжении вниз по наклонной доске, с многообещающими результатами. Работа привлекла к себе внимание всей страны, хотя некоторые статьи представляли ее выводы с некоторой иронией: «Так что в далеком будущем, когда вы увидите, что со скалы на вас сверху прыгает ужасный робот, вы сможете сказать, что во всем виновата кошка» {34} .
В 2017 г. и другие группы добились значительного прогресса в задаче о падающей робокошке. В ходе совместного проекта исследователи из Британии и Ирана разрабатывали модели робокошек возрастающей сложности — из двух секций, затем из трех, затем из восьми — и проектировали для машины систему управления, которая избегала бы «сингулярностей», то есть умела бы обходить проблему буриданова осла. Постройка прототипа планируется {35} .
Стоит упомянуть также падающего робота, которого спроектировали Морган Поуп и Гюнтер Нимейер в лаборатории сети Disney Research в 2017 г. {36} Их машина вообще не похожа на кошку. Она выглядит как обвешанный схемами кирпич, называется подходяще — «Бинарный роботизированный инерциально управляемый кирпич» (Binary Robotic Inertially Controlled brick, BRICK) — и меняет ориентацию в воздухе согласно представлениям Максвелла. Кирпичу перед падением придается быстрое горизонтальное вращение, а далее он внутренне управляет своим моментом инерции и меняет тем самым скорость вращения. Ученым удалось показать, что такой робот способен самостоятельно менять ориентацию в достаточной степени, чтобы успешно пролететь сквозь отверстие в форме кирпича.
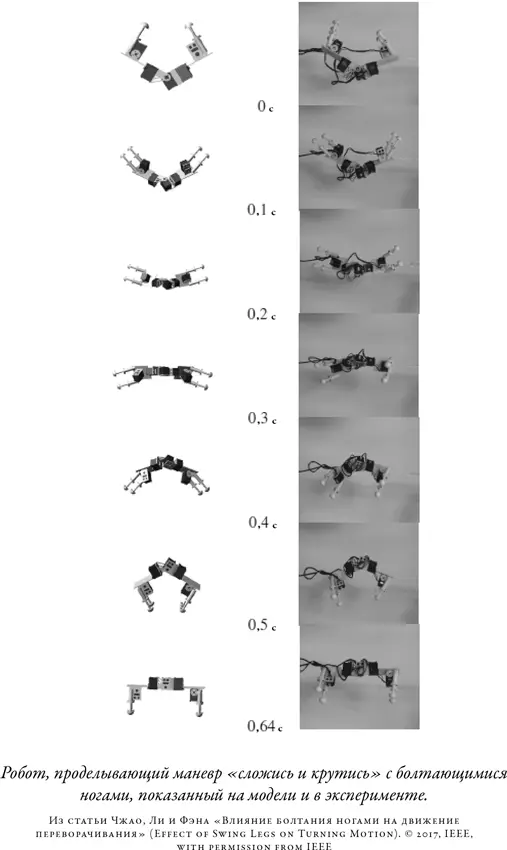
Первый, возможно реальный электронный прототип робота, имитирующего падающую кошку, внешне хотя бы отдаленно напоминающий кошку, построили три китайских исследователя — Цзясюань Чжао, Лу Ли и Баолинь Фэн {37} . Модель кошачьего переворачивания, которую они используют, основана в первую очередь на методе «сложись и крутись», но при этом ногам робота позволено свободно болтаться на шарнирах, чтобы оптимизировать движение. Сам робот, хотя и производит сильное впечатление, действует, судя по всему, по заранее прописанному жесткому алгоритму и не оценивает оптимальные для приземления движения на лету, как это делает реальная кошка. В робототехнике падающей кошки полное согласование математики и механизмов пока не достигнуто.
Обычные шагающие и бегающие роботы, однако, к настоящему моменту сделали резкий рывок в своем развитии. Начиная с 2013 г. компания Boston Dynamics разрабатывает гуманоидного робота по имени Атлас, обладающего поразительной степенью координации. Атлас — крупный образец, его рост составляет примерно 180 см, а весит он около 150 кг. В 2017 г. компания выпустила видеосюжет, в котором Атлас запрыгивает на ящики и даже делает сальто назад. Еще через год она выпустила видеосюжет, в котором Атлас бегает по траве и пересеченной местности. Как написал в сети один комментатор, «теперь робот Атлас компании Boston Dynamics сможет гоняться за вами по лесу» {38} . Если оставить в стороне апокалиптические прогнозы, то Атлас показывает, какой путь развития прошли роботы с того времени, когда «Данте II» безуспешно пытался выбраться из вулканического кратера на шести ногах. Тем не менее роботов не стали меньше бояться с тех пор, когда 100 лет назад на свет появился Геркулес, паровой родич Атласа.
Не каждый создаваемый в лабораториях робот представляет собой потенциальную угрозу человечеству. Инженеры копании по выпуску игрушек Hasbro сотрудничают с исследователями Университета Брауна, пытаясь усовершенствовать свои первоначальные разработки по созданию роботизированной кошки-компаньона по имени Доступный роботизированный интеллект для поддержки пожилых людей (Affordable Robotic Intelligence for Elderly Support, ARIES) {39} . Этот робот, внешне похожий на кошку, умеющий мурлыкать и мяукать, подобно кошке, спроектирован как недорогой спутник и помощник для пожилых людей. ARIES обладает ограниченными двигательными функциями, имитирующими движения живой кошки: к примеру, он перекатывается на спину, чтобы ему почесали брюшко; кроме того, его можно запрограммировать так, чтобы он напоминал хозяину о необходимости визита к врачу и времени приема лекарств. Современные роботы, помимо всего прочего, могут обладать шерстью и иметь забавный характер — природные качества кошек.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Загадка падающей кошки и фундаментальная физика»
Представляем Вашему вниманию похожие книги на «Загадка падающей кошки и фундаментальная физика» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.



Обсуждение, отзывы о книге «Загадка падающей кошки и фундаментальная физика» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.