Грегори Гбур - Загадка падающей кошки и фундаментальная физика
Здесь есть возможность читать онлайн «Грегори Гбур - Загадка падающей кошки и фундаментальная физика» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2021, ISBN: 2021, Издательство: Альпина нон-фикшн, Жанр: Физика, Домашние животные, sci_popular, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Загадка падающей кошки и фундаментальная физика
- Автор:
- Издательство:Альпина нон-фикшн
- Жанр:
- Год:2021
- Город:Москва
- ISBN:978-5-0013-9363-4
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Загадка падающей кошки и фундаментальная физика: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Загадка падающей кошки и фундаментальная физика»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
В своей увлекательной и остроумной книге физик и заядлый кошатник Грегори Гбур показывает, как попытки понять механику падения кошек помогли разобраться в самых разных задачах в математике, физике, физиологии, неврологии и космической биологии, способствовали развитию фотографии и кинематографа и оказали влияние даже на робототехнику.
Поиск ответа на загадку падающей кошки погружает читателей в увлекательный мир науки, из которого они узнают решение головоломки, но также обнаружат, что феномен кошачьего выверта по-прежнему вызывает горячие споры ученых.
Автор убежден, что чем больше мы исследуем поведение этих животных, тем больше сюрпризов они нам преподносят.
Загадка падающей кошки и фундаментальная физика — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Загадка падающей кошки и фундаментальная физика», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Хотя кошачий хвост в подобных маневрах куда менее эффективен, чем хвост ящерицы, экспериментальные исследования показали, что кошка тоже пользуется хвостом для равновесия {28} . Здесь вновь на сцену выходит высокоскоростная фотосъемка. Ученые снимали кошек, идущих по узкой балке, которую внезапно сдвигают в сторону. Видеосъемка показывает, что кошки при этом делают взмах хвостом, пытаясь уравновесить неожиданное движение.
Другие существа выработали в процессе эволюции еще более необычные методы управления тангажем, и эти методы также начинают использоваться в робототехнике. Обнаружено, что пауки-скакуны семейства Salticidae , прежде чем прыгнуть в воздух, прикрепляют к своему насесту каркасную шелковую нить; контролируя натяжение этой нити по мере ее удлинения, они могут управлять наклоном тела, чтобы приземлиться всеми ногами. В 2015 г. исследователи из Университета Кейптауна продемонстрировали, что робот тоже мог бы использовать эту стратегию {29} . Их робот «Лип» («Линейно-оснащенная автономная платформа» — Line-Equipped Autonomous Platform, LEAP) для максимальной легкости был построен на шасси из кирпичиков LEGO Technic; получившийся в конечном итоге аппарат весил 88 г. Этот робот самостоятельно определял, когда нужно активировать контроль нити, при помощи собственного варианта вестибулярной системы — акселерометра. Находясь на стартовой платформе, робот испытывал на себе действие нормальной силы тяжести; после прыжка исчезновение силы тяжести служило для него сигналом к началу управления нитью, — примерно так же, как рефлекс переворачивания у кошки активируется ощущением невесомости.
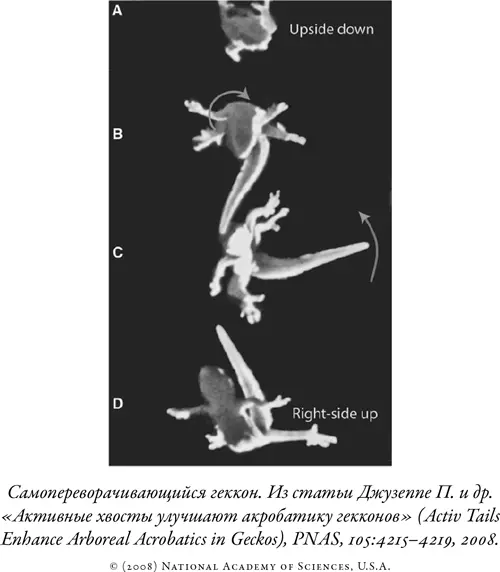
Чем дальше исследователи изучают движение животных, тем больше они обнаруживают различных методов самостоятельного переворачивания в воздухе. В статье, заголовок которой может, пожалуй, претендовать на второе место — «Воздушные маневры прыгающих лемуров» (Aerial Maneuvers of Leping Lemurs), — Дональд Данбар из Университета Пуэрто-Рико исследовал необычные способы смены ориентации в воздухе у кольцехвостых лемуров {30} . Лемур часто прыгает, находясь высоко на дереве лицом к стволу; при этом он способен перепрыгнуть на другое дерево и оказаться на нем тоже лицом к стволу. В этом случае лемур использует две стратегии: он начинает поворот, когда еще держится за дерево — «Модификация момента импульса до отрыва от земли», и подправляет при помощи хвоста свое вращение перед приземлением — «Изменение ориентации тела посредством движения конечности».
Даже крылатые существа пользуются необычными техниками самоориентации. В 2015 г. исследователи из Университета Брауна продемонстрировали, что очковые листоносы и более мелкие коротконосые крыланы при выполнении замечательно быстрых воздушных маневров управляют инерцией своих крыльев {31} . Эту стратегию можно рассматривать как аналогичную модели «подожмись и поворачивайся» у кошек, только роль двух половинок тела кошки здесь играют крылья. Если поджать одно крыло, то второе будет разворачивать тело мыши гораздо сильнее. Исследователи предполагают, что знание этой техники поможет расширить возможности и улучшить маневренность летающих роботов.
Но строились ли где-нибудь реальные физические модели роботизированных кошек? Еще в 1992 г. японские исследователи изучали модель переворачивания кошки типа «сложись и крутись» методами робототехники; возможно, именно их робот был первым реальным роботом, основанным на принципе падающей кошки. Оригинальная статья вышла на японском языке; в 2014 г. один из авторов, Такаси Кавамура из Университета Синсю, опубликовал краткое описание работы на английском языке {32} . Эта модель кошки немного напоминала механическую кошку Галли из двух цилиндров, соединенных гибкой перемычкой, но в ней использовалась активная схема управления. «Мышцы» представляли собой исполнительные устройства на пневматической тяге, что позволяло активно контролировать робота в свободном падении. Однако целью японцев было не создание универсального самопереворачивающегося робота, а всего лишь проверка гипотезы «сложись и крутись».
Большая часть работы по роботизированным кошкам относится к самому последнему времени и находится пока на начальных этапах — в основном, кажется, из-за трудностей с разработкой надежной управляющей системы. В 2013 г. исследователи из Аделаидского университета провели моделирование робота, имитирующего падающую кошку {33} . Столкнувшись с разнообразием предлагаемых стратегий переворачивания в воздухе, ученые австралийской группы решили сосредоточиться на разработке робота, способного воплотить оригинальную модель Марея «подожмись и поворачивайся». Их моделирование, которое вы можете здесь видеть, предсказывает переворот кошки немногим больше чем за полсекунды. Исследователи планируют построить работающий прототип.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Загадка падающей кошки и фундаментальная физика»
Представляем Вашему вниманию похожие книги на «Загадка падающей кошки и фундаментальная физика» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.



Обсуждение, отзывы о книге «Загадка падающей кошки и фундаментальная физика» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.