Нурбей Гулиа - Физика - Парадоксальная механика в вопросах и ответах
Здесь есть возможность читать онлайн «Нурбей Гулиа - Физика - Парадоксальная механика в вопросах и ответах» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: Физика, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Физика: Парадоксальная механика в вопросах и ответах
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Физика: Парадоксальная механика в вопросах и ответах: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Физика: Парадоксальная механика в вопросах и ответах»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Для учителей общеобразовательных школ.
Физика: Парадоксальная механика в вопросах и ответах — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Физика: Парадоксальная механика в вопросах и ответах», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Но интерес представляют не маховики с «пассивным» изменением момента инерции, а те, у которых этот показатель можно менять принудительно. Для чего же это может потребоваться?
При постоянном кинетическом моменте маховика можно увеличивать момент инерции за счет уменьшения угловой скорости и наоборот. Пример – человек с гантелями в руках на так называемой платформе Жуковского – диске, закрепленном на стойке на подшипниках (рис. 12, а, б).
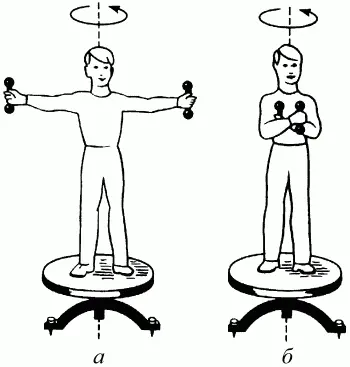
Рис. 12. Человек на платформе (скамье) Жуковского: а – с разведенными в сторону руками и большим моментом инерции; б – со сдвинутыми к центру руками и минимальным моментом инерции
Если человек, стоя на этой платформе с разведенными в стороны руками, вращается (рис. 12, а), то сведя руки с гантелями к центру (рис. 12, б), он снижает свой момент инерции, за счет чего значительно увеличивает угловую скорость. Маховики с регулируемым переменным моментом инерции могли бы обеспечить практически любую угловую скорость, необходимую рабочему органу машины, например, колесам автомобиля.
3.7. Вопрос. К каким последствиям может привести замена инерциальной системы отсчета на неинерциальную, например, вращающуюся?
Ответ. Каждому относительному движению тела во вращающейся системе отсчета можно поставить в соответствие движение точно такого же тела относительно инерциальной системы координат. Но для такого соответствия надо воспроизвести не только те реальные силы, которые действовали на исходное тело, но и добавить новые силы, соответствующие эйлеровым силам инерции в относительном движении исходного тела. Эйлеровы силы инерции здесь определяются как реальные силы, действующие на тело, в предположении, что подвижная система отсчета условно принимается за неподвижную. Например, если поворачивающий автобус мы примем за неподвижный, то нам придется считать реальными центробежные силы, действующие на повороте.
Таким образом, если мы свяжем подвижную систему координат с Землей, то ускорение точки на Земле в «абсолютной» системе – реальное ускорение – будет являться векторной суммой трех ускорений: относительного, переносного и кориолисова (по имени французского механика XIX века Густава Кориолиса), которое возникает тогда, когда подвижная система координат вращается. Вот с этим-то кориолисовым ускорением и соответствующей ему кориолисовой силой начинают происходить «чудеса» наподобие тех, что происходят с даламберовыми силами инерции. Их начинают считать реально существующими, приписывать им соответствующие действия и т. д.
Здесь надо твердо помнить, что и переносные, и кориолисовы силы инерции – силы нереальные, они зависят только от выбора системы координат и не отражают взаимодействий взятой точки с другими точками. Не имеют эти силы и противодействия, которое по третьему закону Ньютона должна иметь каждая сила. Силы инерции, какими бы они ни были, всегда нереальны; и нельзя верить, если даже в учебнике написано, что они на что-то «действуют» (см. вопрос 3.3). Силы эти, по образному выражению известного физика Ричарда Фейнмана, – «псевдосилы».
3.8. Вопрос. Можно ли определить эйлеровы силы инерции не формально, а исходя из физической сути явлений?
Ответ. Можно, хотя на это понадобится воображение [17]. Рассмотрим вспомогательное тело, полностью идентичное основному. Пусть это вспомогательное тело совершает в точности такие же движения по отношению к произвольно выбранной «абсолютной» системе координат, какие совершает основное тело по отношению к выбранной неинерциальной системе координат. Таким образом, на все точки вспомогательного тела действуют те же физические силы, что и на основное тело. Однако, чтобы движение вспомогательного тела относительно «абсолютной» системы координат в точности повторяло движение основного тела относительно неинерциальной системы координат, необходимо к вспомогательной системе приложить, помимо всех физических сил основной системы, еще и дополнительные силы. Так как движение рассматривается по отношению к «абсолютной», инерциальной системе отсчета, то это могут быть только физические силы. Очевидно, что они точно соответствуют эйлеровым силам инерции.
Таким образом, эйлеровы силы инерции равны тем физическим силам, которые следует добавить к исходным физическим силам, чтобы в точности воспроизвести относительное движение какого-либо тела как движение абсолютное, т. е. в инерциальной системе отсчета.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Физика: Парадоксальная механика в вопросах и ответах»
Представляем Вашему вниманию похожие книги на «Физика: Парадоксальная механика в вопросах и ответах» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.


Обсуждение, отзывы о книге «Физика: Парадоксальная механика в вопросах и ответах» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.