John Long - Darwin’s Devices
Здесь есть возможность читать онлайн «John Long - Darwin’s Devices» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: Биология, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Darwin’s Devices
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Darwin’s Devices: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Darwin’s Devices»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
In Darwin’s Devices, Long tells the story of these evolving biorobots—how they came to be, and what they can teach us about the biology of living and extinct species. Evolving biorobots can replicate creatures that disappeared from the earth long ago, showing us in real time what happens in the face of unexpected environmental challenges. Biomechanically correct models of backbones functioning as part of an autonomous robot, for example, can help us understand why the first vertebrates evolved them.
But the most impressive feature of these robots, as Long shows, is their ability to illustrate the power of evolution to solve difficult technological challenges autonomously—without human input regarding what a workable solution might be. Even a simple robot can create complex behavior, often learning or evolving greater intelligence than humans could possibly program. This remarkable idea could forever alter the face of engineering, design, and even warfare.
An amazing tour through the workings of a fertile mind, Darwin’s Devices will make you rethink everything you thought you knew about evolution, robot intelligence, and life itself.
Darwin’s Devices — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Darwin’s Devices», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
If you look back at Figure 4.1, you’ll notice that from generations 1 to 2, when selection was present, we had a big increase in the feeding behavior score that was correlated with a jump in structural stiffness. This pattern was as we predicted, and it allowed us to make the nifty overlay in Figure 4.3 in which the Tadro3 with the stiffest tail has the best feeding behavior and the Tadro with the most flexible tail has the worst. Also from generations 2 to 3, when selection wasn’t present, we still see that feeding behavior and structural stiffness are correlated, changing together. All is well, even though stiffness is dropping a bit. No big surprise, given that random genetic changes can be dominant in the absence of selection, as we talked about earlier.
After generation 2 the system appears to run amok: from generations 3 to 4 and beyond, really, the one-to-one connection between behavior and stiffness disappears. Behavior drops or stays constant while structural stiffness increases. Or the behavior score increases while structural stiffness drops, as in generations 4 to 5. In this case, in the absence of selection we know that we have only random genetic processes driving the evolutionary changes. Randomness challenges our assumptions. Because of the one-to-one relationship between behavior and stiffness from generations 1 to 3, we assumed that the structural stiffness of the axial skeleton was causally related to the feeding behavior. But faced with the evidence from later evolutionary changes, that relationship is either not true or it’s only true some of the time. How can we tell?
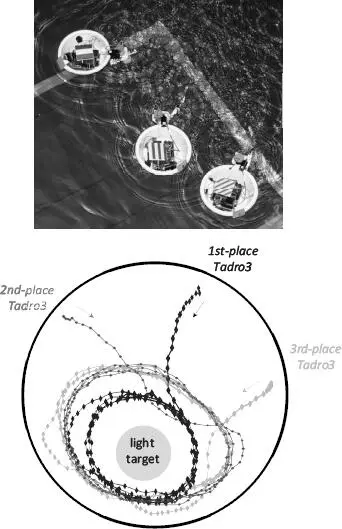
FIGURE 4.3. Tadro3s compete for food. In the top image the three Tadro3s jockey for position as they navigate to the light target, which serves as food. Note that the Tadro3 up top is taking a slightly different path than the other two. In the bottom diagram the paths of three Tadro3s competing in generation 1 are overlaid to show their differences in behavior. The first-place Tadro3 moves quickly to the light target, earning top scores as well for speed and the tight orbit it holds around the target. In contrast, the third-place Tadro meanders toward the target from its starting position and holds a much larger orbit around the target. For all three Tadro3s, the structural stiffnesses of their notochords positively correlated with their behavioral performance. This relationship between stiffness and behavior in generation 1 was reflected only in the evolutionary change in the population from generations 1 to 2 and 2 to 3 (see Figure 4.1).
When complexity dims the light of interpretation, one way to navigate is to stop and examine your assumptions. In our case, the first assumption we tested was a fundamental one: when we selected for enhanced feeding behavior the population responded by evolving enhanced feeding behavior. This was what happened. Thank goodness! Selection was present in four generations: 1, 5, 6, and 9; in three of those cases (generations 1, 6, and 9), the ensuing generations showed higher average feeding scores than their parental generation (see also Figure 4.4). We took the data from each individual, not just the averages, from all four of those generations with selection and statistically tested the mean response to selection. The statistical test confirmed what we see by eye: on average, selection evolves enhanced feeding behavior. Keep in mind that even when selection is acting, randomness will almost always deflect, to lesser or greater degree, the population’s evolutionary trajectory that selection proposes (see Figure 4.2).
We can learn something new (for us) and important by examining the only time, from generation 5 to 6, when selection didn’t evolve improved feeding behavior. If you look at the change in genes that results from selection (bottom panel, Figure 4.1), you can see a drop in tail length, L , accompanied by a jump in material stiffness, E . Going back to our handy-dandy equation (I just knew it would be useful) for structural stiffness, k , we know that because of the magnifying effects of the L 3term in the denominator, the population’s average k must be higher in generation 6 than in generation 5. And, indeed, we see that jump in average k in the structural stiffness plot just above the genes plot. This connection of genes and increased structural stiffness rules out the random genetic deflection idea in this case as the primary cause of the evolution of the feeding behavior. To explain this fully, though, we have to go on a little journey. Fasten your safety harness, please.
What the disconnect between selection in generation 5 and feeding behavior in generation 6 suggests is that we need to test this assumption: feeding behavior is causally connected to structural stiffness of the notochord. If this assumption were always true, then we’d expect to see behavior improve or decline in concert with increases or decreases, respectively, in the notochord’s structural stiffness. From our previous discussion, we know that behavior and stiffness don’t show any regular pattern that might lead us to believe that they were causally connected. However, several other patterns are possible. First, it could be that changes in the notochords’ structural stiffness are correlated not with the overall feeding behavior but rather with some of feeding’s sub-behaviors: swimming speed, body wobble, average distance from the food, and time to find the food. Second, those sub-behaviors might not be correlated with structural stiffness but rather with the stiffnesses’ subcharacters: material stiffness, E , and length of the tail, L .
We ran a series of statistical tests to look at the patterns of correlation of the stiffness variables on one hand—structural stiffness, k , material stiffness, E , and length of the tail, L —and the behavioral variables on the other—swimming speed, V , body wobble, W , distance from food, D , and time to find the food, T . As separate independent variables in a linear regression, k , E , or L all predict about 20 percent of the variation in V and W but predict none of the variation in D and T . [43] In statistics-ese these least-squares linear regressions are all “highly significant,” with p < 0.01 in each case. Prior to testing, all data were transformed so that they fit a normal distribution. The 20 percent refers to the “coefficient of determination,” also called the “r-squared value,” a number from 0 to 1 that indicates how well the best-fit line represents the relationship between the dependent and independent variables.
Moreover, k and E are positively correlated with V and W , and L is negatively correlated with V and W . Thus, we’ve got a clear relationship between structural stiffness of the notochord and swimming speed and body wobble, two of the four components of the feeding behavior score.
What’s strange about this pattern of correlations is that swimming speed and body wobble are positively correlated. Recall that we had predetermined that the fitness function would judge increased speed as “good” and increased body wobble, distance to the food, and time to the food as “bad.” Thus, the fitness function should, when selection is strong enough to create differential reproduction, create this specific pattern of correlations among the sub-behaviors (Figure 4.4). Instead, the evolutionary pattern that we always got was the one we just identified with statistics on individuals across generations: speed and wobble always increased together under selection.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Darwin’s Devices»
Представляем Вашему вниманию похожие книги на «Darwin’s Devices» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.

Обсуждение, отзывы о книге «Darwin’s Devices» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.