Christopher Hallinan - Embedded Linux Primer - A Practical, Real-World Approach
Здесь есть возможность читать онлайн «Christopher Hallinan - Embedded Linux Primer - A Practical, Real-World Approach» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Год выпуска: 2006, ISBN: 2006, Издательство: Prentice Hall, Жанр: ОС и Сети, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Embedded Linux Primer: A Practical, Real-World Approach
- Автор:
- Издательство:Prentice Hall
- Жанр:
- Год:2006
- ISBN:978-0-13-167984-9
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Embedded Linux Primer: A Practical, Real-World Approach: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Embedded Linux Primer: A Practical, Real-World Approach»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
This book brings together indispensable knowledge for building efficient, high-value, Linux-based embedded products: information that has never been assembled in one place before. Drawing on years of experience as an embedded Linux consultant and field application engineer, Christopher Hallinan offers solutions for the specific technical issues you're most likely to face, demonstrates how to build an effective embedded Linux environment, and shows how to use it as productively as possible.
Hallinan begins by touring a typical Linux-based embedded system, introducing key concepts and components, and calling attention to differences between Linux and traditional embedded environments. Writing from the embedded developer's viewpoint, he thoroughly addresses issues ranging from kernel building and initialization to bootloaders, device drivers to file systems.
Hallinan thoroughly covers the increasingly popular BusyBox utilities; presents a step-by-step walkthrough of porting Linux to custom boards; and introduces real-time configuration via CONFIG_RT--one of today's most exciting developments in embedded Linux. You'll find especially detailed coverage of using development tools to analyze and debug embedded systems--including the art of kernel debugging.
• Compare leading embedded Linux processors
• Understand the details of the Linux kernel initialization process
• Learn about the special role of bootloaders in embedded Linux systems, with specific emphasis on U-Boot
• Use embedded Linux file systems, including JFFS2--with detailed guidelines for building Flash-resident file system images
• Understand the Memory Technology Devices subsystem for flash (and other) memory devices
• Master gdb, KGDB, and hardware JTAG debugging
• Learn many tips and techniques for debugging within the Linux kernel
• Maximize your productivity in cross-development environments
• Prepare your entire development environment, including TFTP, DHCP, and NFS target servers
• Configure, build, and initialize BusyBox to support your unique requirements
Embedded Linux Primer: A Practical, Real-World Approach — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Embedded Linux Primer: A Practical, Real-World Approach», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
• Preemption is disabled only around critical sections.
This is where the kernel developers have been heading since the original preemptable kernel patch series. However, this is no easy task. It involves poring over the entire kernel source code base, analyzing exactly what data must be protected from concurrency, and disabling preemption at only those locations. The method used for this has been to instrument the kernel for latency measurements, find the longest latency code paths, and fix them. The more recent Linux 2.6 kernels can be configured for very low-latency applications because of the effort that has gone into this "lock-breaking" methodology.
17.2.3. SMP Kernel
It is interesting to note that much of the work involved in creating an efficient multiprocessor architecture also benefits real time. The SMP challenge is more complex than the uniprocessor challenge because there is an additional element of concurrency to protect against. In the uniprocessor model, only a single task can be executing in the kernel at a time. Protection from concurrency involves only protection from interrupt or exception processing. In the SMP model, multiple threads of execution in the kernel are possible in addition to the threat from interrupt and exception processing.
SMP has been supported from early Linux 2. x kernels. A Big Kernel Lock (BKL) was used to protect against concurrency in the transition from uniprocessor to SMP operation. The BKL is a global spinlock, which prevents any other tasks from executing in the kernel. In his excellent book Linux Kernel Development (Novell Press, 2005), Robert Love characterized the BKL as the "redheaded stepchild of the kernel." In describing the characteristics of the BKL, Robert jokingly added "evil" to its list of attributes!
Early implementations of the SMP kernel based on the BKL led to significant inefficiencies in scheduling. It was found that one of the CPUs could be kept idle for long periods of time. Much of the work that led to an efficient SMP kernel also directly benefited real-time applicationsprimarily lowered latency. Replacing the BKL with smaller-grained locking surrounding only the actual shared data to be protected led to significantly reduced preemption latency.
17.2.4. Sources of Preemption Latency
A real-time system must be capable of servicing its real-time tasks within a specified upper boundary of time. Achieving consistently low preemption latency is critical to a real-time system. The two single largest contributors to preemption latency are interrupt-context processing and critical section processing where interrupts are disabled. You have already learned that a great deal of effort has been targeted at reducing the size (and thus, duration) of the critical sections. This leaves interrupt-context processing as the next challenge. This was answered with the Linux 2.6 real-time patch.
17.3. Real-Time Kernel Patch
Support for hard real time is not in the mainline kernel.org source tree. To enable hard real time, a patch must be applied. The real-time kernel patch is the cumulative result of several initiatives to reduce Linux kernel latency. The patch had many contributors, and it is currently maintained by Ingo Molnar; you can find it at http://people.redhat.com/~mingo/realtime-preempt. The soft real-time performance of the 2.6 Linux kernel has improved significantly since the early 2.6 kernel releases. When 2.6 was first released, the 2.4 Linux kernel was substantially better in soft real-time performance. Since about Linux 2.6.12, soft real-time performance in the single-digit milliseconds on a reasonably fast x86 processor is readily achieved. To get repeatable performance beyond this requires the real-time patch.
The real-time patch adds several important features to the Linux kernel. Figure 17-4 displays the configuration options for Preemption mode when the real-time patch has been applied.
Figure 17-4. Preemption modes with real-time patch
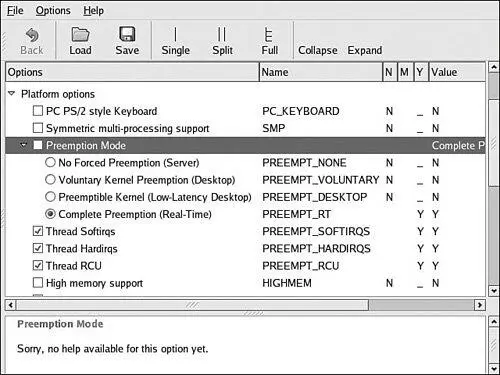
The real-time patch adds a fourth preemption mode called PREEMPT_RT, or Preempt Real Time. The four preemption modes are as follows:
• PREEMPT_NONE : No forced preemption. Overall latency is, on average, good, but there can be some occasional long delays. Best suited for applications for which overall throughput is the top design criteria.
• PREEMPT_VOLUNTARY : First stage of latency reduction. Additional explicit preemption points are placed at strategic locations in the kernel to reduce latency. Some loss of overall throughput is traded for lower latency.
• PREEMPT_DESKTOP : This mode enables preemption everywhere in the kernel except when processing within critical sections. This mode is useful for soft real-time applications such as audio and multimedia. Overall throughput is traded for further reductions in latency.
• PREEMPT_RT : Features from the real-time patch are added, including replacing spinlocks with preemptable mutexes. This enables involuntary preemption everywhere within the kernel except for those areas protected by preempt_disable(). This mode significantly smoothes out the variation in latency (jitter) and allows a low and predictable latency for time-critical real-time applications.
If kernel preemption is enabled in your kernel configuration, it can be disabled at boot time by adding the following kernel parameter to the kernel command line:
preempt=0
17.3.1. Real-Time Features
Several new Linux kernel features are enabled with CONFIG_PREEMPT_RT. From Figure 17-4, we see several new configuration settings. These and other features of the real-time Linux kernel patch are described here.
17.3.1.1. Spinlock Converted to Mutex
The real-time patch converts most spinlocks in the system to mutexes. This reduces overall latency at the cost of slightly reduced throughput. The benefit of converting spinlocks to mutexes is that they can be preempted. If Process A is holding a lock, and Process B at a higher priority needs the same lock, Process A can preempt Process B in the case where it is holding a mutex.
17.3.1.2. ISRs as Kernel Tasks
With CONFIG_PREEMPT_HARDIRQ selected, interrupt service routines [118] Also called HARDIRQs.
(ISRs) are forced to run in process context. This gives the developer control over the priority of ISRs because they become schedulable entities. As such, they also become preemptable to allow higher-priority hardware interrupts to be handled first.
This is a powerful feature. Some hardware architectures do not enforce interrupt priorities. Those that do might not enforce the priorities consistent with your specified real-time design goals. Using CONFIG_PREEMPT_HARDIRQ, you are free to define the priorities at which each IRQ will run.
Conversion of ISRs to threads can be disabled at runtime through the /proc file system or at boot time by entering a parameter on the kernel command line. When enabled in the configuration, unless you specify otherwise, ISR threading is enabled by default.
To disable ISR threading at runtime, issue the following command as root:
# echo '0' >/proc/sys/kernel/hardirq_preemption
To verify the setting, display it as follows:
# cat /proc/sys/kernel/hardirq_preemption
1
To disable ISR threading at boot time, add the following parameter to the kernel command line:
hardirq-preempt=0
17.3.1.3. Preemptable Softirqs
Интервал:
Закладка:
Похожие книги на «Embedded Linux Primer: A Practical, Real-World Approach»
Представляем Вашему вниманию похожие книги на «Embedded Linux Primer: A Practical, Real-World Approach» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.












Обсуждение, отзывы о книге «Embedded Linux Primer: A Practical, Real-World Approach» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.