Christopher Hallinan - Embedded Linux Primer - A Practical, Real-World Approach
Здесь есть возможность читать онлайн «Christopher Hallinan - Embedded Linux Primer - A Practical, Real-World Approach» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Год выпуска: 2006, ISBN: 2006, Издательство: Prentice Hall, Жанр: ОС и Сети, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Embedded Linux Primer: A Practical, Real-World Approach
- Автор:
- Издательство:Prentice Hall
- Жанр:
- Год:2006
- ISBN:978-0-13-167984-9
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Embedded Linux Primer: A Practical, Real-World Approach: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Embedded Linux Primer: A Practical, Real-World Approach»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
This book brings together indispensable knowledge for building efficient, high-value, Linux-based embedded products: information that has never been assembled in one place before. Drawing on years of experience as an embedded Linux consultant and field application engineer, Christopher Hallinan offers solutions for the specific technical issues you're most likely to face, demonstrates how to build an effective embedded Linux environment, and shows how to use it as productively as possible.
Hallinan begins by touring a typical Linux-based embedded system, introducing key concepts and components, and calling attention to differences between Linux and traditional embedded environments. Writing from the embedded developer's viewpoint, he thoroughly addresses issues ranging from kernel building and initialization to bootloaders, device drivers to file systems.
Hallinan thoroughly covers the increasingly popular BusyBox utilities; presents a step-by-step walkthrough of porting Linux to custom boards; and introduces real-time configuration via CONFIG_RT--one of today's most exciting developments in embedded Linux. You'll find especially detailed coverage of using development tools to analyze and debug embedded systems--including the art of kernel debugging.
• Compare leading embedded Linux processors
• Understand the details of the Linux kernel initialization process
• Learn about the special role of bootloaders in embedded Linux systems, with specific emphasis on U-Boot
• Use embedded Linux file systems, including JFFS2--with detailed guidelines for building Flash-resident file system images
• Understand the Memory Technology Devices subsystem for flash (and other) memory devices
• Master gdb, KGDB, and hardware JTAG debugging
• Learn many tips and techniques for debugging within the Linux kernel
• Maximize your productivity in cross-development environments
• Prepare your entire development environment, including TFTP, DHCP, and NFS target servers
• Configure, build, and initialize BusyBox to support your unique requirements
Embedded Linux Primer: A Practical, Real-World Approach — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Embedded Linux Primer: A Practical, Real-World Approach», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Figure 17-1. Latency components
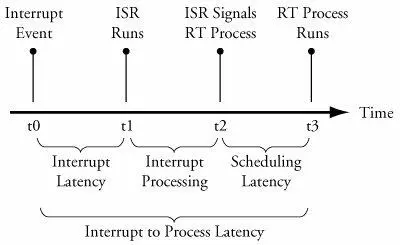
It is considered good design practice to minimize the processing done in the actual interrupt service routine. Indeed, this execution context is limited in capability (for example, an ISR cannot call a blocking function, one that might sleep), so it is desirable to simply service the hardware device and leave the data processing to a Linux bottom half , [116] Robert Love explains bottom-half processing in great detail in his book Linux Kernel Development. See Section 17.5.1, "Suggestions for Additional Reading," at the end of this chapter for the reference.
also called softIRQs.
When the ISR/bottom half has finished its processing, the usual case is to wake up a user space process that is waiting for the data. This is indicated by time t2 in Figure 17-1. At some point in time later, the real-time process is selected by the scheduler to run and is given the CPU. This is indicated by time t3 in Figure 17-1. Scheduling latency is affected primarily by the number of processes waiting for the CPU and the priorities among them. Setting the Real Time attribute on a process gives it higher priority over normal Linux processes and allows it to be the next process selected to run, assuming that it is the highest priority real-time process waiting for the CPU. The highest-priority real-time process that is ready to run (not blocked on I/O) will always run. You'll see how to set this attribute shortly.
17.2. Kernel Preemption
In the early Linux days of Linux 1. x , there was no kernel preemption. This meant that when a user space process requested kernel services, no other task could be scheduled to run until that process either blocked (goes to sleep) waiting on something (usually I/O), or until the kernel request is completed. Making the kernel preemptable [117] Interestingly, there is much debate on the correct spelling of preemptable! I defer to the survey done by Rick Lehrbaum on www.linuxdevices.com/articles/AT5136316996.html.
means that while one process is running in the kernel, another process can preempt the first and be allowed to run even though the first process had not completed its in-kernel processing. Figure 17-2 illustrates this.
Figure 17-2. Kernel preemption
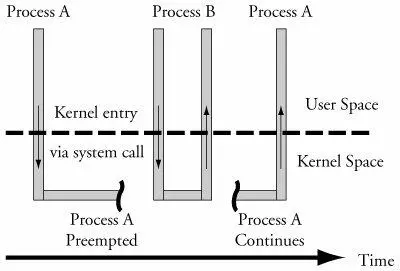
In this figure, Process A has entered the kernel via a system call. Perhaps it was a call to write() to a device such as the console or a file. While executing in the kernel on behalf of Process A, Process B with higher priority is woken up by an interrupt. The kernel preempts Process A and assigns the CPU to Process B, even though Process A had neither blocked nor completed its kernel processing.
17.2.1. Impediments to Preemption
The challenge in making the kernel fully preemptable is to identify all the places in the kernel that must be protected from preemption. These are the critical sections within the kernel where preemption cannot be allowed to occur. For example, assume that Process A in Figure 17-2 is executing in the kernel performing a file system operation. At some point, the code might need to write to an in-kernel data structure representing a file on the file system. To protect that data structure from corruption, the process must lock out all other processes from accessing the shared data structure. Listing 17-1 illustrates this concept using C syntax.
Listing 17-1. Locking Critical Sections
...
preempt_disable();
...
/* Critical section */
update_shared_data();
...
preempt_enable();
...
If we did not protect shared data in this fashion, the process updating the shared data structure could be preempted in the middle of the update. If another process attempted to update the same shared data, corruption of the data would be virtually certain. The classic example is when two processes are operating directly on common variables and making decisions on their values. Figure 17-3 illustrates such a case.
Figure 17-3. Shared data concurrency error
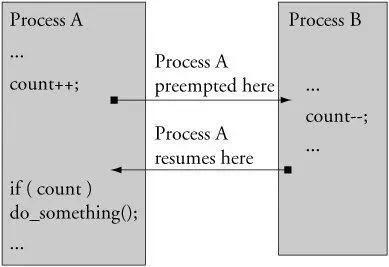
In Figure 17-3, Process A is interrupted after updating the shared data but before it makes a decision based on it. By design, Process A cannot detect that it has been preempted. Process B changes the value of the shared data before Process A gets to run again. As you can see, Process A will be making a decision based on a value determined by Process B. If this is not the behavior you seek, you must disable preemption in Process A around the shared datain this case, the operation and decision on the variable count.
17.2.2. Preemption Models
The first solution to kernel preemption was to place checks at strategic locations within the kernel code where it was known to be safe to preempt the current thread of execution. These locations included entry and exit to system calls, release of certain kernel locks, and return from interrupt processing. At each of these points, code similar to Listing 17-2 was used to perform preemption.
Listing 17-2. Check for Preemption a la Linux 2.4 + Preempt Patch
...
/*
* This code is executed at strategic locations within
* the Linux kernel where it is known to be safe to
* preempt the current thread of execution
*/
if (kernel_is_preemptable() && current->need_resched) preempt_schedule();
...
/*
* This code is in .../kernel/sched.c and is invoked from
* those strategic locations as above
*/
#ifdef CONFIG_PREEMPT
asmlinkage void preempt_schedule(void) {
while (current->need_resched) {
ctx_sw_off();
current->state |= TASK_PREEMPTED;
schedule();
current->state &= ~TASK_PREEMPTED;
ctx_sw_on_no_preempt();
}
}
#endif
...
The first snippet of code in Listing 17-2 (simplified from the actual code) is invoked at those strategic locations described earlier, where it is known that the kernel is safe to preempt. The second snippet of code in Listing 17-2 is the actual code from an early Linux 2.4 kernel with the preempt patch applied. This interesting while loop causes a context switch via the call to schedule() until all requests for preemption have been satisfied.
Although this approach led to reduced latencies in the Linux system, it was not ideal. The developers working on low-latency soon realized the need to "flip the logic." With earlier preemption models, we had this:
• The Linux kernel was fundamentally nonpreemptable.
• Preemption checks were sprinkled around the kernel at strategic locations known to be safe for preemption.
• Preemption was enabled only at these known-safe points.
To achieve a further significant reduction in latency, we want this in a preemptable kernel:
• The Linux kernel is fully preemptable everywhere.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Embedded Linux Primer: A Practical, Real-World Approach»
Представляем Вашему вниманию похожие книги на «Embedded Linux Primer: A Practical, Real-World Approach» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.












Обсуждение, отзывы о книге «Embedded Linux Primer: A Practical, Real-World Approach» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.