John Crisp - Introduction to Microprocessors and Microcontrollers
Здесь есть возможность читать онлайн «John Crisp - Introduction to Microprocessors and Microcontrollers» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Год выпуска: 2004, ISBN: 2004, Издательство: Elsevier, Жанр: Компьютерное железо, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Introduction to Microprocessors and Microcontrollers
- Автор:
- Издательство:Elsevier
- Жанр:
- Год:2004
- ISBN:0-7506-5989-0
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Introduction to Microprocessors and Microcontrollers: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Introduction to Microprocessors and Microcontrollers»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Introduction to Microprocessors and Microcontrollers — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Introduction to Microprocessors and Microcontrollers», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
In a similar way, the video RAM that holds the information to be displayed on a monitor can be found by subtracting the lower address D800H from the higher address E000H to give 800H. Dividing by 400H indicates 2 kbytes of video RAM.
Example
If a 12 kbytes block of ROM started at the address 8000H, what is the highest address in the ROM?
Since 1 kbyte = 1024, it follows that 12 kbytes = 12×1024 or 12 288 in denary. Converting this to hex gives 3000H. Now, we have to be a bit careful. If the ROM includes 3000H addresses, they will run from 0 to 2FFFH. Adding the start address of 8000H to the highest address will give 8000+2FFF=AFFFH, which is the highest address in the ROM.
In each case, choose the best option.
1 An SRAM with 12 address pins and 8 data pins would have:
(a) an organization of 12×8 bits.
(b) approximately 16¾ M locations.
(c) an organization of 12×8 bits.
(d) a storage capacity of 32 768 bits.
2 A bistable:
(a) can store two bits of information.
(b) is another name for flop-flip.
(c) has a floating output.
(d) is made from several registers.
3 The pin that is most similar to one marked as CS may be labelled as:
(a) OE.
(b) CAS.
(c) CE.
(d) Vcc.
4 If, in a memory map, the lowest address of an 8 kbyte RAM is 1000H the highest address would be:
(a) 8192H.
(b) 2FFFH.
(c) 7FFFH.
(d) 3000H.
5 A UVEPROM:
(a) is programmed by ultraviolet light.
(b) loses the data if the power supplies are disconnected.
(c) is a form of non-volatile memory.
(d) is used in a SIMM.
7. A microprocessor-based system
How simple can a microprocessor-based system actually be? It must obviously contain a microprocessor otherwise it is simply another electronic circuit. A microprocessor must be programmed. This means that it must be provided with a series of instructions to be followed. However we program the microprocessor, the result is a series of binary numbers that represent the simple step by step instructions to be followed. These instructions must be stored in some memory. But do the instructions have to be stored in RAM or ROM? It must be in ROM. Remember that RAM will hold random data when first switched on and if our microprocessor was controlling the operation of a dynamite factory, the last thing that we would want is for it to start following random instructions at the rate of a million a second!
What determines how fast the microprocessor carries out the instructions? For the moment we will say that regular pulses of voltage applied to the microprocessor determine its speed. This voltage pulse is called a clock pulse.
A clock circuit controls the operation of the microprocessor. This produces a series of voltage pulses like a ticking clock. The whole system runs sequentially, doing the required jobs one after the other. One step completed for each tick of the clock system.
The clock circuit can be mostly internal to the microprocessor or it can be entirely external. It is unlike a normal watch or clock in that the exact speed is not important. It may be running at a nominal rate of 200 MHz but if it actually ran at 199 MHz or 201 MHz there would be no great panic. With a modern watch, the equivalent error of seven minutes a day would mean a trip back to the supplier. In Figure 7.1 a typical clock pulse is shown.
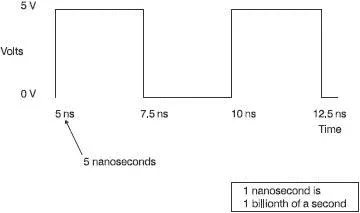
Figure 7.1 A 200 MHz clock pulse
The shape of the clock pulse is stipulated in detail in the microprocessor specification. If it does not stay within the limits stated, serious problems can occur. Let’s assume that two circuits have to switch at the same time but they operate at slightly different voltages. In Figure 7.2 the two operating voltages occur at virtually the same moment due to the very fast rise time. In Figure 7.3 the clock pulse has a very slow rise and fall time and Circuit 1 will switch before Circuit 2. In this example, the difference is about 2 ns. Whether or not a 2 ns difference is significant will depend on the circuit being considered.
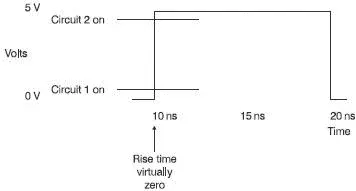
Figure 7.2 An almost vertical leading edge means zero rise time
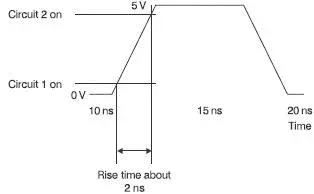
Figure 7.3 The rise time is about 2 ns
All microprocessor technical data will stipulate the maximum rise time and fall time and between which voltages it is being measured. For example, the Intel 80386 has a supply voltage of 0–5 V and must have a rise time (and fall time) of less than 2 ns when measured between 0.8 V and 4.2 V.
If the rise time (written as t ror t rise) is not shown, it is normally measured between 10 and 90% values of the supply voltage. Each microprocessor has a maximum frequency for the clock pulses and a minimum value.
Why is there a minimum speed?
Microprocessors have internal registers and storage areas called capacitors that are like dynamic RAM and need refreshing at intervals. As the clock speed is reduced, the interval between refreshing gets longer until the register or capacitor can no longer hang on to the information and the whole operation collapses. Typically, the minimum clock speed is about a quarter of the maximum speed. The Intel 80386 will run down to 800 kHz.
The first microprocessor, in 1971, was the Intel 4004. It ran at a clock speed of 0.108 MHz and handled 4 bits at a time. In 1998, the 64-bit Alpha 21164 runs at 600 MHz, king for a day but will, no doubt, soon take its place on the museum shelf. (It is 700 MHz now and the ink is barely dry!)
The most basic system is therefore going to include a microprocessor, clock and a ROM chip to provide the built-in sequence of instructions. The only other essential is to have wires or other conductors to connect the circuit. Figure 7.4 shows the most basic microprocessor based system with just the bare essentials. As usual, the power supplies are not shown.
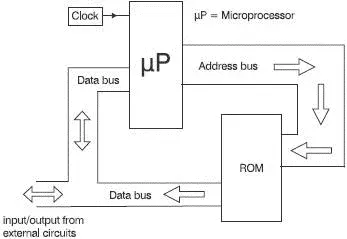
Figure 7.4 The most basic microprocessor-based system
All microprocessors are connected internally and to the rest of the system by collections of conductors called buses.
These conductors are in groups, since many will be going to the same place for much the same purpose. For example, an 8-bit microprocessor normally uses 8 connectors to carry the data between the microprocessor and the memory. It would make diagrams very complicated if each wire were to be shown separately so we group them together and refer to them as the data bus. A bus is therefore a collection of conductors providing a similar function.
In a microprocessor-based system we have three main buses: the data bus, the address bus and a control bus. The data bus is a two-way bus carrying data around the system. Information going into the microprocessor and results coming out. The address bus carries addresses and is a one-way bus from the microprocessor to the memory or other devices. The control bus is rather different from the other two. It is a somewhat looser collection of conductors. If we look at a microprocessor-based system we can easily see the data and address buses since they consist of many parallel connections. However, the control bus is just an association of all the other necessary connections such as those to the chip select and read/write pins.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Introduction to Microprocessors and Microcontrollers»
Представляем Вашему вниманию похожие книги на «Introduction to Microprocessors and Microcontrollers» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




Обсуждение, отзывы о книге «Introduction to Microprocessors and Microcontrollers» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.