Валерий Евстратов - Эхолоты и GPS навигаторы
Здесь есть возможность читать онлайн «Валерий Евстратов - Эхолоты и GPS навигаторы» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2006, ISBN: 2006, Издательство: Array Рыбацкая Академия, Жанр: Хобби и ремесла, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Эхолоты и GPS навигаторы
- Автор:
- Издательство:Array Рыбацкая Академия
- Жанр:
- Год:2006
- Город:Москва
- ISBN:5-94382-079-5
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Эхолоты и GPS навигаторы: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Эхолоты и GPS навигаторы»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Эхолоты и GPS навигаторы — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Эхолоты и GPS навигаторы», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
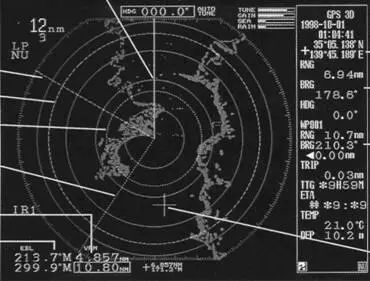
Рис . 72.Измерение дальности на экране радара
Для точных измерений может быть использован курсор и подвижный маркер расстояний VRM. Курсор – это отметка на экране в виде перекрестия, управляемая с помощью клавиш или трэкбола. Чтобы измерить дальность до цели, достаточно поместить перекрестие на внутреннюю кромку отметки, после чего искомое значение дальности вместе со значением азимута высветится в специальном окне в углу экрана.
Маркер расстояний – это кольцо на экране, радиус которого может выбираться оператором. Изменяя величину радиуса, Оператор совмещает кольцо с внутренней границей отметки цели – и вы получите значение расстояния до цели, высвеченное в углу экрана.
Измерение направления
Направление отсчитывается от курсовой линии – вертикальной линии на экране, совпадающей с диаметральной плоскостью судна. При наличии сопряженных с радаром магнитного компаса или гирокомпаса, отсчет азимута может осуществляться от магнитного или истинного направления на Север.
Измерение направления может осуществляться по положению цели на градусной сетке, с помощью курсора (аналогично показанному выше измерению дальности) либо с использованием линии электронного маркера пеленга EBL.
Первый способ дает большие ошибки измерения направления на цель и используется при судовождении для грубой оценки положения судна относительно цели.
Электронный маркер пеленга (EBL) – это исходящая из центра экрана линия (иногда называемая «линия электронного пеленга»), положение которой может управляться оператором. С помощью органов управления наводят маркер на середину отметки, после чего считывают высвеченные в углу экрана значения азимута, либо получают их по шкале направлений, находящейся на краю экрана.
Определение координат
При сопряжении радара с приемником спутниковой навигации или приемоиндикатором радионавигационных систем «Лоран» или «Дека», он может определять и высвечивать на экране широту и долготу выбранных целей.
Масштабирование
В современных радарах имеется возможность выделения отдельных участков и просмотра их в увеличенном масштабе на экране одновременно с наблюдением общего радиолокационного изображения. Для этого курсором выделяют диапазоны детального просмотра по дальности и азимуту и включают режим масштабирования.
Автоматическое сопровождение целей
При расхождении в условиях плохой видимости с одним судном с использованием радара задача решается довольно просто. Однако, в районах с интенсивным судоходством, когда на экране присутствует много отметок от движущихся и неподвижных целей, задача становится трудновыполнимой для судоводителя и светлое время суток.
Для облегчения распознавания целей на экране радиолокатора и маневрирования при большом количестве судов был создан т.н. «атоматический радар-плоттер» (АРП или ARPA), берущий на себя эту задачу. На современных радарах АРП – это небольшая плата, встраиваемая, при необходимости, в его дисплей.
Распознавание целей осуществляется путем анализа изменения их положения за определенное время, точнее, за определенное количество обзоров и привязки их к своим трассам движения. Выделенным целям автоматически присваиваются номера, которые выводят на экран вместе с целями, их траекториями и векторами скорости.
Многооконный режим
Помимо решения основных задач – обнаружения и определения координат целей – современные радиолокаторы обладают набором функций, существенно расширяющих их возможности.
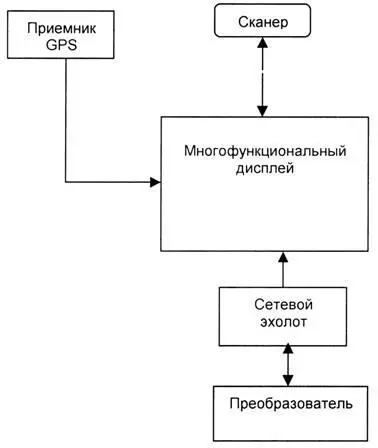
Характерной особенностью современных радаров является многооконный режим работы дисплея. Помимо основного радиолокационного изображения в нижней части экрана располагаются т.н. «Data Boxes»-окна, в которых находится навигационная информация, получаемая от связанных с радаром датчиков – компаса, приемника GPS, эхолота, лага, а также данные о положении на экране курсора и маркеров направления и дальности.
С помощью дополнительных экранных окон можно выделить сектор контроля, положение курсора, а при сопряжении с приемником GPS – характерные для навигатора данные – истинную скорость и направление движения, путевые точки и расстояния до них, получить графическое изображение «Hayway», используемое в приемниках GPS для судовождения по путевым точкам и маршрутам.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Эхолоты и GPS навигаторы»
Представляем Вашему вниманию похожие книги на «Эхолоты и GPS навигаторы» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.



![Василий Евстратов - Шатун 3 [СИ]](/books/417336/vasilij-evstratov-shatun-3-si-thumb.webp)

Обсуждение, отзывы о книге «Эхолоты и GPS навигаторы» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.