Валерий Евстратов - Эхолоты и GPS навигаторы
Здесь есть возможность читать онлайн «Валерий Евстратов - Эхолоты и GPS навигаторы» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2006, ISBN: 2006, Издательство: Array Рыбацкая Академия, Жанр: Хобби и ремесла, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Эхолоты и GPS навигаторы
- Автор:
- Издательство:Array Рыбацкая Академия
- Жанр:
- Год:2006
- Город:Москва
- ISBN:5-94382-079-5
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Эхолоты и GPS навигаторы: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Эхолоты и GPS навигаторы»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Эхолоты и GPS навигаторы — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Эхолоты и GPS навигаторы», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
СУДОВЫЕ РАДИОЛОКАТОРЫ ДЛЯ МАЛОМЕРНОГО ФЛОТА
При плавании в условиях ограниченной видимости – ночью, в тумане, в дожде – существует реальная опасность столкновения с судном или каким-либо надводным препятствием. Для обеспечения безопасности плавания в таких условиях на судах используются специальные приборы – радиолокаторы или, по-английски, радары (аббревиатура фразы «Radio Detecting and Ranging – радиообнаружение и измерение дальности»).
Радиолокаторы впервые появились на судах и военных кораблях и в годы Второй Мировой войны и первоначально использовались для обнаружения воздушных и надводных целей. Обладая высокими по тем временам возможностями, они, тем не менее, оказались не востребованными гражданским флотом – громоздкие и недостаточно надежные, они занимали слишком много места на транспортных и пассажирских судах и, главное, требовали для их эксплуатации достаточно большого количества специально обученного персонала.
Окончательно судовой радиолокатор прописался в ходовой рубке гражданских судов после освоения диапазона волн длиной 3 см, применение которых позволило резко сократить размеры антенн и приемо-передающих устройств, и появления новых, надежных электронных компонентов, существенно повысивших надежность радара и предельно упростивших его эксплуатацию. Однако возможность их установки на относительно небольшие суда появилась лишь после широкого внедрения микроэлектроники, в первую очередь, твердотельных сверхвысокочастотных приборов, микропроцессоров и больших жидкокристаллических матриц (экранов), позволившим, в сочетании с современными методами обработки сигналов, получить компактные, надежные, экономичные и удобные в эксплуатации приборы.
Принцип работы радиолокатора
Прежде, чем переходить к конкретным приборам, кратко познакомимся с основными элементами и принципами работы радиолокатора.
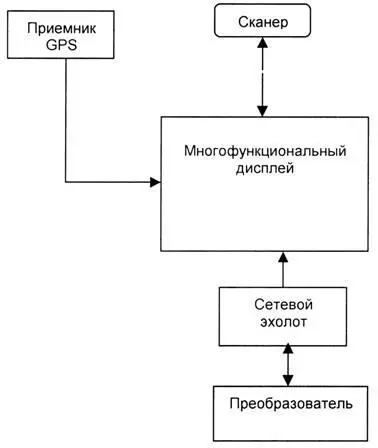
Любой радиолокатор имеет три основных элемента – антенну, приемопередатчик и дисплей ( рис . 70). В современных судовых радарах два первых элемента, как правило, объединяются в отдельный модуль, обычно называемый сканером (от слова «сканировать» – просматривать, искать).
При работе вращающаяся в горизонтальной плоскости антенна радара ( рис . 71) излучает вырабатываемые передатчиком короткие высокочастотные импульсы (т.н. «зондирующие импульсы») и принимает отраженные от различных объектов сигналы. Приемник выделяет отраженные сигналы из шумов и передает их на дисплей, в котором осуществляется их усиление, выделение из различных помех (шумов) и отображение окружающего пространства на экране индикатора кругового обзора. Наблюдая на экране радиолокационную обстановку вокруг судна, оператор производит визуальное обнаружение целей (под целью в радиолокации понимается любой обнаруженный радаром объект), измерение их дальности и азимута относительно судна и управление работой радара.

Рис . 70.Состав судового радиолокатора
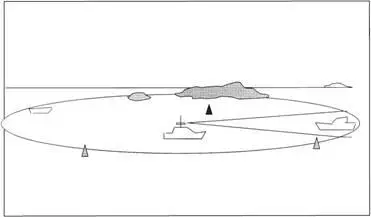
Рис . 71.Принцип действия судового радиолокатора
Основные характеристики радаров
Функциональные возможности радиолокатора определяются рядом характеристик, понимание которых позволяет сделать правильный выбор аппарата, в той или иной степени удовлетворяющего потребностям владельца судна. Познакомимся с некоторыми из них.
Дальность действия
Дальность действия радара, указываемая в его паспортных данных – это его важнейший, но далеко не однозначный показатель, и в реальных условиях дальность обнаружения различных целей не всегда будет совпадать с заявленной.
Дальность обнаружения зависит от многих факторов – отражательной способности цели (характеризуемой т.н. ЭПР – эффективной поверхностью рассеяния), ее контрастностью по отношению к фону, высотой антенны и цели, состоянием атмосферы и моря. Поэтому, данная характеристика задается дифференцированно по типам целей и условиям работы радара. В соответствии с требованиями Международной Морской Организации IMO, при нормальных условиях распространения радиоволн, высоте установки антенны РЛС 15 м над уровнем воды и при отсутствии помех от моря, РЛС должна обеспечивать четкую индикацию:
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Эхолоты и GPS навигаторы»
Представляем Вашему вниманию похожие книги на «Эхолоты и GPS навигаторы» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.



![Василий Евстратов - Шатун 3 [СИ]](/books/417336/vasilij-evstratov-shatun-3-si-thumb.webp)

Обсуждение, отзывы о книге «Эхолоты и GPS навигаторы» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.