Эндрю Уэзеролл - Компьютерные сети. 5-е издание
Здесь есть возможность читать онлайн «Эндрю Уэзеролл - Компьютерные сети. 5-е издание» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Год выпуска: 2011, ISBN: 2011, Издательство: Питер, Жанр: Старинная литература, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Компьютерные сети. 5-е издание
- Автор:
- Издательство:Питер
- Жанр:
- Год:2011
- ISBN:9785446100682
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Компьютерные сети. 5-е издание: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Компьютерные сети. 5-е издание»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Компьютерные сети. 5-е издание — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Компьютерные сети. 5-е издание», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Рис. 4.23.Проблема: а — скрытой станции; б — засвеченной станции
Необязательный механизм RTS/CTS с помощью NAV запрещает станциям отправлять кадры одновременно со скрытыми станциями. Пример показан на рис. 4.24. В этом примере станция A хочет передать данные станции B. Станция C находится в зоне действия (то есть слышит) А, а также, возможно, в зоне действия В, но это не имеет значения. Станция D входит в зону действия B, но не входит в зону действия А.
Протокол начинает работать тогда, когда А решает, что ей необходимо послать данные В. А посылает станции В кадр RTS, запрашивая разрешение на передачу. Если В может принять данные, она отсылает обратно подтверждение о том, что канал чист — кадр CTS. После приема CTS А отправляет кадр и запускает таймер ACK. В случае корректного приема В генерирует кадр ACK, завершающий передачу. Если интервал времени таймера на станции A истекает прежде, чем получен ACK, то считается, что произошла коллизия, и весь алгоритм работы протокола повторяется с самого начала после периода молчания.
Теперь рассмотрим этот же процесс с точки зрения станций C и D. C находится в зоне действия А, поэтому она также принимает кадр RTS и понимает, что скоро по каналу будут передаваться какие-то данные. Исходя из информации, содержащейся в RTS, станция С может предположить, сколько времени займет передача последовательности, включая конечный ACK. Поэтому, чтобы не мешать другим, она воздерживается от передачи данных, пока обмен не будет завершен. Для этого она обновляет свою запись NAV, указывая, что канал занят, как показано на рис. 4.24. Станция D не слышит RTS, зато слышит CTS и также выставляет NAV Обратите внимание: сигналы NAV не передаются, а являются лишь внутренними напоминаниями станций о том, что нужно хранить молчание в течение определенного промежутка времени.
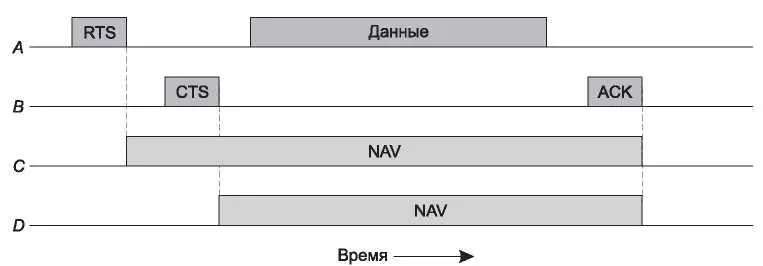
Рис. 4.24. Использование прослушивания виртуального канала в протоколе CSMA/CA
Однако, несмотря на теоретическую привлекательность модели RTS/CTS, это один из тех методов, практическая реализация которых провалилась. Есть несколько причин, почему она используется так редко. Она не рассчитана на короткие кадры (которые отправляются вместо RTS) и на присутствие точек доступа (которые, по определению, должны быть слышны всем). В других ситуациях она также замедляет работу. RTS/CTS в стандарте 802.11 немного отличается от протокола MACA, с которым мы познакомились в разделе 4.2, потому что каждый, кто получает RTS или CTS, сохраняет молчание в течение какого-то промежутка, для того чтобы подтверждение ACK сумело пройти по каналу без коллизий. По причине этого проблема засвеченной станции не решается, как при использовании протокола MACA, устраняется только проблема скрытых станций. Чаще всего скрытых станций совсем немного, и CSMA/ CA и так помогает им. Эта технология замедляет станции, которым по какой-либо причине не удается успешно передать данные, для того чтобы повысить вероятность удачной пересылки.
CSMA/CA с физическим и виртуальным прослушиванием составляет суть протокола 802.11. Однако есть несколько других механизмов, разработанных для того же стандарта. Каждый из этих механизмов вызван определенными потребностями, связанными с фактическими условиями.
Первая потребность — это надежность. В противоположность проводным каналам, беспроводные шумны и ненадежны, в какой-то степени из-за влияния других устройств, таких как СВЧ-печи, работающих в том же диапазоне ISM. Использование подтверждений и повторных передач мало помогает, если вероятность передачи кадра мала.
Основная стратегия, используемая для увеличения числа успешных передач, состоит в том, чтобы понизить скорость передачи. Более медленные скорости используют более сильные методы модуляции сигнала, который с большей вероятностью будет правильно получен для данного отношения сигнал/шум. Если потеряно слишком много кадров, станция может понизить скорость. Если кадры доставляются с небольшой потерей, станция может иногда пробовать более высокую скорость, чтобы увидеть, может ли она использоваться.
Другая стратегия улучшить шанс кадра дойти неповрежденным состоит в том, чтобы посылать более короткие кадры. Если вероятность ошибки в одном бите равна р, то вероятность того, что n-битный кадр будет принят корректно, равна (1 - p) n. Например, для р = 10 -4вероятность корректной передачи полного Ethemet-кадра длиной 12 144 бит составляет менее 30 %. Большая часть кадров будет потеряна. Но если длина кадров будет составлять только одну треть (4048 бит), то две трети их будут получены правильно. Теперь большинство кадров пройдет, и будет необходимо меньше повторных передач.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Компьютерные сети. 5-е издание»
Представляем Вашему вниманию похожие книги на «Компьютерные сети. 5-е издание» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




Обсуждение, отзывы о книге «Компьютерные сети. 5-е издание» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.