Эндрю Уэзеролл - Компьютерные сети. 5-е издание
Здесь есть возможность читать онлайн «Эндрю Уэзеролл - Компьютерные сети. 5-е издание» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Год выпуска: 2011, ISBN: 2011, Издательство: Питер, Жанр: Старинная литература, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Компьютерные сети. 5-е издание
- Автор:
- Издательство:Питер
- Жанр:
- Год:2011
- ISBN:9785446100682
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Компьютерные сети. 5-е издание: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Компьютерные сети. 5-е издание»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Компьютерные сети. 5-е издание — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Компьютерные сети. 5-е издание», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Если копнуть чуть глубже, то на количество коллизий сильное влияние оказывает задержка распространения сигнала. Существует небольшая вероятность того, что как только станция начнет передачу, другая станция также окажется готовой к передаче и опросит канал. Если сигнал от первой станции еще не успел достичь второй станции, вторая станция решит, что канал свободен, и также начнет передачу, результатом чего будет коллизия. Вероятность зависит от числа кадров, умещающихся в канал, или от показателя «полоса пропускания, умноженная на задержку» для данного канала. Если в канал умещается лишь небольшая часть кадра, как бывает в большинстве локальных сетей, где задержка распространения невелика, то и шанс коллизии мал. Чем больше время распространения сигнала, тем выше вероятность столкновений и ниже производительность протокола.
Однако даже такая система значительно лучше чистой системы ALOHA, так как обе станции воздерживаются от передачи, пока передает третья станция. То же самое можно сказать о дискретной системе ALOHA.
Вторым протоколом с опросом несущей является ненастойчивый протокол CSMA. В данном протоколе предпринята попытка сдержать стремление станций начинать передачу, как только освобождается канал. Как и выше, прежде чем начать передачу, станция опрашивает канал. Если никто не передает в данный момент по каналу, станция начинает передачу сама. Однако если канал занят, станция не ждет освобождения канала, постоянно прослушивая его и пытаясь захватить сразу, как только он освободится, как в предыдущем протоколе. Вместо этого станция ждет в течение случайного интервала времени, а затем снова прослушивает линию. Очевидно, данный алгоритм должен привести к лучшему использованию канала и к большим интервалам ожидания, чем протокол CSMA с настойчивостью 1.
Наконец, третий протокол, который мы рассмотрим, это протокол CSMA с настойчивостью р. Он применяется в дискретных каналах и работает следующим образом. Когда станция готова передавать, она опрашивает канал. Если канал свободен, она с вероятностью p начинает передачу. С вероятностью q = 1 - p она отказывается от передачи и ждет начала следующего такта. Этот процесс повторяется до тех пор, пока кадр не будет передан или какая-либо другая станция не начнет передачу. В последнем случае станция ведет себя так же, как в случае столкновения. Она ждет в течение случайного интервала времени, после чего начинает все снова. Если при первом прослушивании канала он оказывается занят, станция ждет следующего интервала времени, после чего применяется тот же алгоритм. В IEEE 802.11 применяется улучшенная версия протокола CSMA с настойчивостью р, которую мы рассмотрим далее.
На рис. 4.4 показана расчетная зависимость производительности канала от предлагаемого потока кадров для всех трех протоколов, а также для чистой и дискретной систем ALOHA.
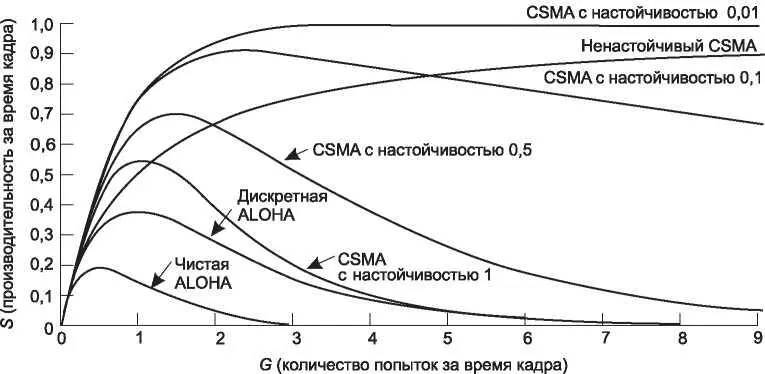
Рис. 4.4. Сравнение использования канала в зависимости от его загрузки для различных протоколов коллективного доступа
Протокол CSMA с обнаружением коллизий
Настойчивый и ненастойчивый протоколы CSMA, несомненно, являются улучшениями системы ALOHA, поскольку они гарантируют, что никакая станция не начнет передачу, если она определит, что канал уже занят. Однако если две станции, обнаружив, что канал свободен, одновременно начали передачу, столкновение все равно произойдет. Еще одно улучшение — способность станций быстро распознавать коллизию и немедленно прекращать передачу (а не завершать ее), так как данные все равно искажены. Эта стратегия экономит время, и улучшается производительность канала.
Такой протокол, называемый CSMA/CD (Carrier-Sense Multiple Access with Collision Detection — множественный доступ с контролем несущей и обнаружением коллизий), является основой чрезвычайно популярных ЛВС Ethernet, поэтому мы уделим некоторое время более или менее подробному рассмотрению CSMA/CD. Важно понимать, что распознавание коллизий представляет собой аналоговый процесс. Оборудование станции должно «прослушивать» канал во время передачи. Если оно считывает сигнал и понимает, что он отличается от пересылаемого, то сразу понятно — произошла коллизия. Следствие таково, что полученный сигнал не обязательно должен идеально совпадать с отправленным (что может быть сложно в беспроводных сетях — принимаемый сигнал нередко в 1 000 000 раз слабее передаваемого) и что необходимо выбирать такой способ уплотнения, который позволит распознавать коллизии (например, коллизию двух 0-вольтовых сигналов распознать практически невозможно).
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Компьютерные сети. 5-е издание»
Представляем Вашему вниманию похожие книги на «Компьютерные сети. 5-е издание» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




Обсуждение, отзывы о книге «Компьютерные сети. 5-е издание» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.