Qing-Chang Zhong - Power Electronics-Enabled Autonomous Power Systems
Здесь есть возможность читать онлайн «Qing-Chang Zhong - Power Electronics-Enabled Autonomous Power Systems» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Power Electronics-Enabled Autonomous Power Systems
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Power Electronics-Enabled Autonomous Power Systems: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Power Electronics-Enabled Autonomous Power Systems»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Power Electronics-Enabled Autonomous Power Systems — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Power Electronics-Enabled Autonomous Power Systems», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Another fundamental systemic flaw of current power systems is that a local fault can lead to cascading failures (Schäfer et al. 2018; Yang et al. 2017). On 28 September 2016, tornadoes with high‐speed winds damaged and tripped two 275 kV transmission lines in South Australia (SA), causing six voltage dips in 2 min. Eight wind farms exceeded the preset number of voltage dips and tripped, losing 456 MW wind generation in 7 s. The imported power through the Victoria–SA Heywood Interconnector (510 MW) significantly increased and forced it to trip within 0.7 s, islanding SA from the National Electricity Market and leaving an imbalance of 1 GW. Subsequently, all gas generators tripped and all supply to SA was lost, leading to a state‐wide blackout. About 850,000 customers lost electricity (AEMO 2017). On 16 June 2019, all of Argentina and Uruguay, and parts of Brazil, Chile, and Paraguay in South America were hit by a massive blackout, affecting approximately 48 million people (Regan and McLaughlin 2019). The blackout originated at an electricity transmission point between the power stations at Argentina's Yacyreta Dam and Salto Grande in the country's northeast. On 9 August 2019, a major blackout struck England and Wales, affecting almost a million homes and forcing trains to a standstill around the UK (Ambrose 2019). Again, it was caused by something not uncommon, the loss of a gas‐fired power plant and an offshore wind farm. There is a pressing demand to correct this systemic flaw and prevent local faults from cascading into wide‐area blackouts.
The purpose of this book is to summarize the author's profound thinking over the last 18 years on these problems, which he anticipated in 2001, and present a theoretical framework, together with its underpinning technologies and case studies, for future power systems with up to 100% penetration of distributed energy resources to achieve harmonious interaction, to prevent local faults from cascading into wide‐area blackouts, and to operate autonomously without relying on ICT systems and completely avoid cyber‐attacks.
It is purely a coincidence that The New York Times report on cyber‐attacks on Russia's power grid, the South America blackout, the US legislation on preventing cyber‐attacks to the grid, and the UK blackout all happened within the last two months when this book was being finalized, signaling the right time to complete this book.
1.2 Outline of the Book
As shown in Figure 1.1, this book contains this introductory chapter (Chapter 1) and five parts: Part I: Theoretical Framework ( Chapters 2and 3), Part II: First‐Generation VSMs ( Chapters 4– 14), Part III: Second‐Generation VSMs ( Chapters 15– 20), Part IV: Third‐Generation VSMs ( Chapter 21), and Part V: Case Studies ( Chapters 22– 25). Most of the chapters include experimental results or real‐time simulation results, as indicated with a large or small triangle tag at the bottom‐right corner of the corresponding chapter box in Figure 1.1, and, hence, the technologies can be applied in practice with minimum effort.
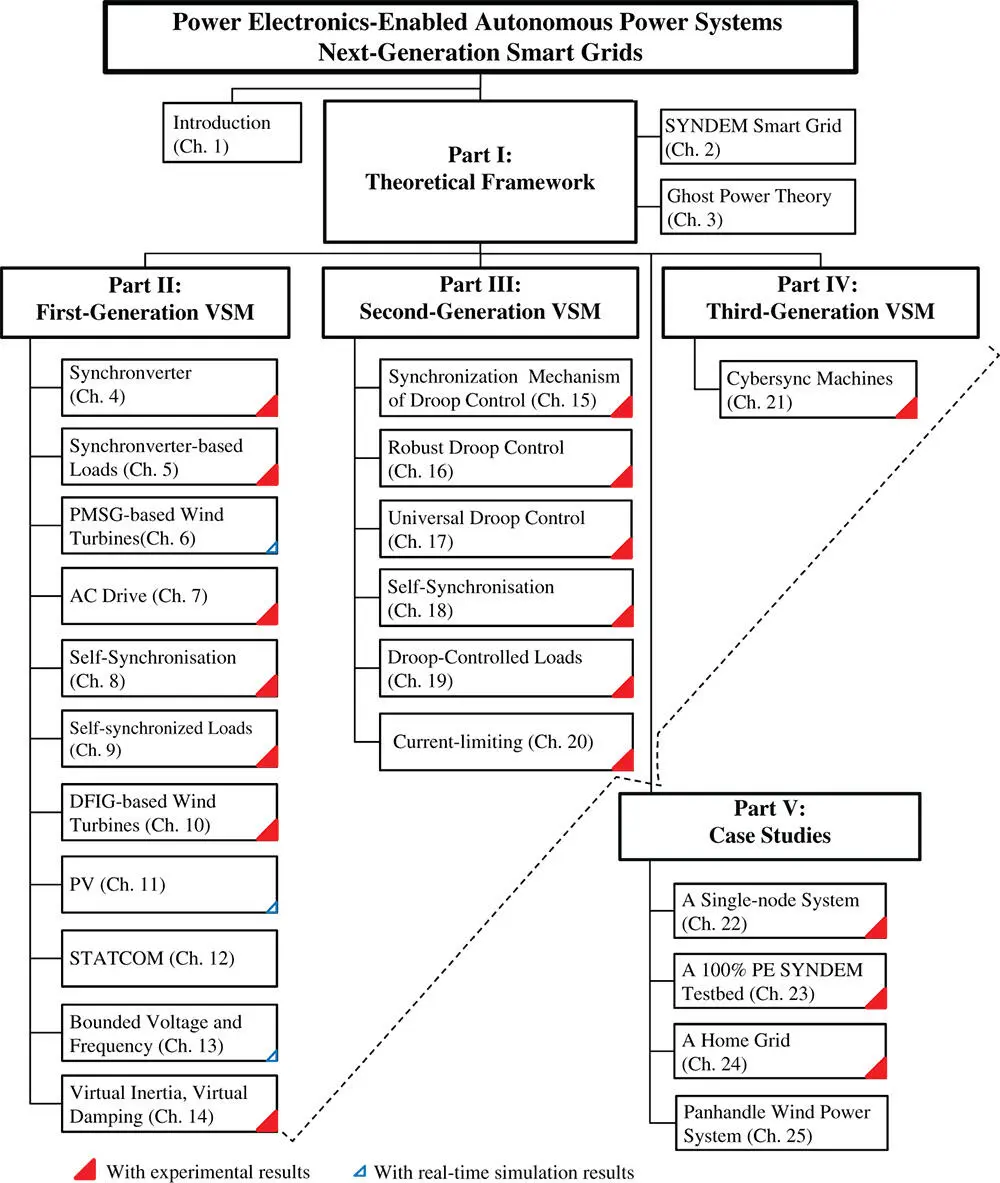
Figure 1.1Structure of the book.
In this introductory chapter, in addition to the outline of the book, the evolution of power systems is briefly presented to set the stage for the following five parts.
Part I: Theoretical Framework contains two chapters. Chapter 2presents the SYNDEM theoretical framework for next‐generation smart grids – power electronics‐enabled autonomous power systems, covering the concept of SYNDEM smart grids, the rule of law that governs SYNDEM smart grids, the legal equality for all SYNDEM active players to equally take part in grid regulation, the architecture of SYNDEM smart grids, a brief description of potential technical routes, and the roots of the SYNDEM concept. Chapter 3introduces a new operator, called the ghost operator  , to physically construct the ghost of a (sinusoidal) signal and, further, the ghost of a system with sinusoidal inputs. Moreover, the reactive power of an electrical system is shown to be the real power of the ghost system with its input being the ghost of the input to the original system. This is then applied to define the reactive power for mechanical systems, completing the electrical‐mechanical analogy, and, furthermore, generalizing to any dynamic system that can be described by a port‐Hamiltonian (PH) system model, establishing a significantly simplified instantaneous power theory, referred to as the ghost power theory. This can be applied to any dynamic system, single phase or poly‐phase, with or without harmonics.
, to physically construct the ghost of a (sinusoidal) signal and, further, the ghost of a system with sinusoidal inputs. Moreover, the reactive power of an electrical system is shown to be the real power of the ghost system with its input being the ghost of the input to the original system. This is then applied to define the reactive power for mechanical systems, completing the electrical‐mechanical analogy, and, furthermore, generalizing to any dynamic system that can be described by a port‐Hamiltonian (PH) system model, establishing a significantly simplified instantaneous power theory, referred to as the ghost power theory. This can be applied to any dynamic system, single phase or poly‐phase, with or without harmonics.
Part II: First‐Generation VSMs contains 11 chapters related to the first‐generation VSMs (synchronverters). Chapter 4presents the synchronverter (1G VSM) technology to operate an inverter to mimic a synchronous generator (SG) after directly embedding the mathematical model of synchronous generators into the controller. The real and reactive power delivered by synchronverters connected in parallel can be automatically shared with the well‐known frequency and voltage droop mechanism. Synchronverters can also be easily operated in the standalone mode. Chapter 5describes a control strategy to operate a PWM rectifier to mimic a synchronous motor. Two controllers, one to directly control the power exchanged with the grid and the other to control the DC‐bus voltage, are discussed. At the same time, the reactive power can be controlled as well. Chapter 6applies the synchronverter technology to control the back‐to‐back PWM converters of PMSG based wind turbines. Both converters are operated as synchronverters. Different from the common practice, the rotor‐side converter (RSC) is controlled to maintain the DC‐link voltage and the grid‐side converter (GSC) is controlled to inject the maximum power available to the grid. Since both converters are operated with 1G VSM technology, the whole wind power system is able to support the grid frequency and voltage when there is a grid fault, making it friendly to the grid. Chapter 7applies the 1G VSM to control the speed of an AC machine in four quadrants, via powering the AC machine with a VSM that generates a variable‐voltage‐variable‐frequency supply. This is a natural and mathematical, rather than physical, extension of the conventional Ward Leonard drive systems for DC machines to AC machines. If the rectifier providing the DC bus for the AC drive is controlled as a virtual synchronous motor according to Chapter 5, then an AC drive is equivalent to a motor–generator–motor system. This facilitates the analysis of AC drives and the introduction of some special functions. Chapter 8takes a radical step to improve the synchronverter as a self‐synchronized synchronverter by removing the dedicated synchronization unit, which is often a phase‐locked loop (PLL). It can automatically synchronize itself with the grid before connection and maintain synchronization with the grid after connection without using a PLL. Experimental results show that this improves the performance of frequency tracking by more than 65%, the performance of real power control by 83% and the performance of reactive power control by about 70%. Chapter 9discusses the removal of the dedicated synchronization unit from synchronverter based loads (rectifiers). Two controllers are presented: one is to directly control the real power exchanged with the grid and the other is to control the DC‐bus voltage. At the same time, the reactive power can be controlled as well. Chapter 10reveals the analogy between differential gears and DFIG and then operates a DFIG based wind turbine as a VSM. An electromechanical model is presented to represent a DFIG as a differential gear that links a rotor shaft driven by a prime mover (the wind turbine), a virtual stator shaft coupled with a virtual synchronous generator and a virtual slip shaft coupled with a virtual synchronous motor. Moreover, an AC drive, which consists of an RSC and a GSC, is adopted to regulate the speed of the slip virtual synchronous motor. Then, the whole DFIG–converter system is operated as one VSG with the stator shaft synchronously rotating at the grid frequency, even when the rotor shaft speed changes, through controlling the virtual slip shaft to synchronously rotate at the slip frequency. Following the concept of the AC Ward Leonard drive systems discussed in Chapter 7, the RSC is controlled as a virtual synchronous generator to generate an appropriate slip voltage, via regulating the real power and reactive power sent to the grid. In order to facilitate this, the GSC is controlled as a virtual synchronous motor to maintain a stable DC‐bus voltage without drawing reactive power in the steady state. A prominent feature is that there is no need to adopt a PLL – either on the grid side or on the rotor side. The system is not only able to provide the kinetic energy stored in the turbine/rotor shaft as inertia to support the grid frequency, but it is also able to provide reactive power to support the grid voltage. Chapter 11applies the 1G VSM to a transformerless PV system, which consists of an independently controlled neutral leg and an inversion leg. The presence of the neutral leg enables the direct connection between the ground of PV panels and the neutral line of the grid, removing the need to have an isolation transformer. This significantly reduces leakage currents because the stray capacitance between the PV panels and the grid neutral line (ground) is bypassed. Another benefit is that the voltage of the PV is only required to be higher than the peak value of the grid voltage, which is the same as that required by conventional full bridge inverters. The resulting PV inverter is also grid‐friendly. Chapter 12applies the 1G VSM to operate a STATCOM as a synchronous generator in the condenser mode, without using a dedicated synchronization unit, such as a PLL. In addition to the conventional voltage regulation mode (or the  ‐mode in short) and the direct
‐mode in short) and the direct  control mode (or the
control mode (or the  ‐mode in short), a third operation mode, i.e. the voltage droop control mode (or the
‐mode in short), a third operation mode, i.e. the voltage droop control mode (or the  ‐mode in short), is introduced to the operation of the STATCOM. This allows parallel‐operated STATCOMs to share reactive power properly and provides more control flexibility. Chapter 13presents an improved 1G VSM to make sure that its frequency and voltage always stay within given ranges. Furthermore, its stability region is analytically characterized according to system parameters so that the improved synchronverter can be always stable and converges to a unique equilibrium as long as the power exchanged at the terminal is kept within this region. Chapter 14explains that the concept of inertia has two aspects of meaning: the inertia time constant that characterizes the speed of the frequency response and the inertia constant that characterizes the amount of energy stored. It is then shown that, while the energy storage aspect of the virtual inertia of a VSM can be met by storage units, the inertia time constant that can be provided by a VSM may be limited because a large inertia time constant may lead to oscillatory frequency responses. A VSM with reconfigurable inertia time constant is then introduced by adding a low‐pass filter to the real power channel. Moreover, a virtual damper is introduced to provide the desired damping ratio, e.g., 0.707, together with the desired inertia time constant. Two approaches are presented to implement the virtual damper: one through impedance scaling with a voltage feedback controller and the other through impedance insertion with a current feedback controller. A by‐product from this is that the fault ride‐through capability of the VSM can be designed as well.
‐mode in short), is introduced to the operation of the STATCOM. This allows parallel‐operated STATCOMs to share reactive power properly and provides more control flexibility. Chapter 13presents an improved 1G VSM to make sure that its frequency and voltage always stay within given ranges. Furthermore, its stability region is analytically characterized according to system parameters so that the improved synchronverter can be always stable and converges to a unique equilibrium as long as the power exchanged at the terminal is kept within this region. Chapter 14explains that the concept of inertia has two aspects of meaning: the inertia time constant that characterizes the speed of the frequency response and the inertia constant that characterizes the amount of energy stored. It is then shown that, while the energy storage aspect of the virtual inertia of a VSM can be met by storage units, the inertia time constant that can be provided by a VSM may be limited because a large inertia time constant may lead to oscillatory frequency responses. A VSM with reconfigurable inertia time constant is then introduced by adding a low‐pass filter to the real power channel. Moreover, a virtual damper is introduced to provide the desired damping ratio, e.g., 0.707, together with the desired inertia time constant. Two approaches are presented to implement the virtual damper: one through impedance scaling with a voltage feedback controller and the other through impedance insertion with a current feedback controller. A by‐product from this is that the fault ride‐through capability of the VSM can be designed as well.
Интервал:
Закладка:
Похожие книги на «Power Electronics-Enabled Autonomous Power Systems»
Представляем Вашему вниманию похожие книги на «Power Electronics-Enabled Autonomous Power Systems» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.





Обсуждение, отзывы о книге «Power Electronics-Enabled Autonomous Power Systems» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.