Position, Navigation, and Timing Technologies in the 21st Century
Здесь есть возможность читать онлайн «Position, Navigation, and Timing Technologies in the 21st Century» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Position, Navigation, and Timing Technologies in the 21st Century
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Position, Navigation, and Timing Technologies in the 21st Century: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Position, Navigation, and Timing Technologies in the 21st Century»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Volume 1 of
contains three parts and focuses on the satellite navigation systems, technologies, and engineering and scientific applications. It starts with a historical perspective of GPS development and other related PNT development. Current global and regional navigation satellite systems (GNSS and RNSS), their inter-operability, signal quality monitoring, satellite orbit and time synchronization, and ground- and satellite-based augmentation systems are examined. Recent progresses in satellite navigation receiver technologies and challenges for operations in multipath-rich urban environment, in handling spoofing and interference, and in ensuring PNT integrity are addressed. A section on satellite navigation for engineering and scientific applications finishes off the volume.
Volume 2 of
consists of three parts and addresses PNT using alternative signals and sensors and integrated PNT technologies for consumer and commercial applications. It looks at PNT using various radio signals-of-opportunity, atomic clock, optical, laser, magnetic field, celestial, MEMS and inertial sensors, as well as the concept of navigation from Low-Earth Orbiting (LEO) satellites. GNSS-INS integration, neuroscience of navigation, and animal navigation are also covered. The volume finishes off with a collection of work on contemporary PNT applications such as survey and mobile mapping, precision agriculture, wearable systems, automated driving, train control, commercial unmanned aircraft systems, aviation, and navigation in the unique Arctic environment.
In addition, this text:
Serves as a complete reference and handbook for professionals and students interested in the broad range of PNT subjects Includes chapters that focus on the latest developments in GNSS and other navigation sensors, techniques, and applications Illustrates interconnecting relationships between various types of technologies in order to assure more protected, tough, and accurate PNT
will appeal to all industry professionals, researchers, and academics involved with the science, engineering, and applications of position, navigation, and timing technologies.pnt21book.com
Position, Navigation, and Timing Technologies in the 21st Century — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Position, Navigation, and Timing Technologies in the 21st Century», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
The initial message, which is at 1.2 Ksps, is convolutionally encoded at a rate r = (1/2) with generator functions g 0= 753 (octal) and g 1= 561 (octal) [48]. The state of the encoder is not reset during the transmission of a message capsule. The resulting symbols are repeated twice, and the resulting frames, which are 128 symbols long, are block‐interleaved using the bit reversal method [47]. The modulated symbols, which have a rate of 4.8 Ksps, are spread with Walsh code 32. The sync message is divided into 80 ms superframes, and each superframe is divided into three frames. The first bit of each frame is called the start of message (SOM). The beginning of the sync message is set to be on the first frame of each superframe, and the SOM of this frame is set to one. The BTS sets the other SOMs to zero. The sync channel message capsule is composed of the message length, the message body, cyclic redundancy check (CRC), and zero padding. The length of the zero padding is such that the message capsule extends up to the start of the next superframe. A 30‐bit CRC is computed for each sync channel message with the generator polynomial

The SOM bits are dropped by the receiver, and the frames bodies are combined to form a sync channel capsule. The sync message structure is summarized in Figure 38.6.
38.5.1.4 Paging Channel
The paging channel transmits all the necessary overhead parameters for the UE to register into the network [46]. Some mobile operators also transmit the BTS latitude and longitude on the paging channel, which can be exploited for navigation. The major cellular CDMA providers in the United States, Sprint and Verizon, do not transmit the BTS latitude and longitude. US Cellular used to transmit the BTS latitude and longitude, but this provider does not operate anymore. The Base Station ID (BID) is also transmitted in the paging channel, which is important to decode for data association purposes. The paging channel message encoding before transmission is illustrated in Figure 38.7.
The initial bit rate of the paging channel message is either 9.6 Kbps or 4.8 Kbps and is provided in the sync channel message. Next, the data is convolutionally encoded in the same way as that of the sync channel data. The output symbols are repeated twice only if the bit rate is less than 9.6 Kbps. After symbol repetition, the resulting frames, which are 384 symbols long, are block‐interleaved one frame at a time. The interleaver is different from the one used for the sync channel because it operates on 384 symbols instead of 128 symbols. However, both interleavers use the bit reversal method. Finally, the paging channel message is scrambled by modulo‐two addition with the long code sequence.

Figure 38.5 Forward link sync channel encoder (Khalife et al. [18]; 3GPP2 [50]).
Source: Reproduced with permission of IEEE.
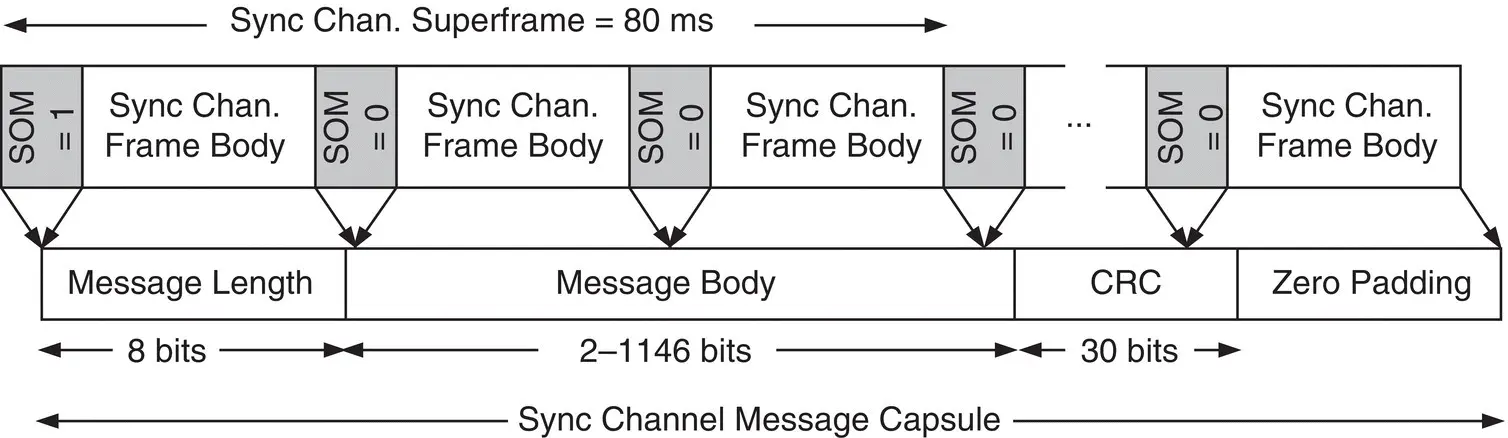
Figure 38.6 Sync channel message structure (Khalife et al. [18]; 3GPP2 [50]).
Source: Reproduced with permission of IEEE.
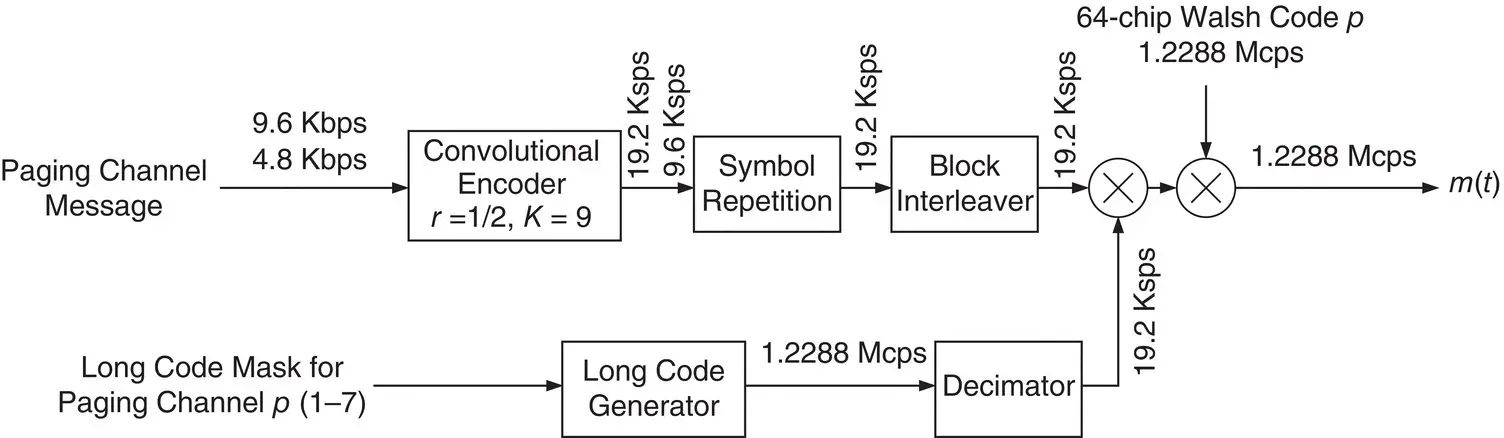
Figure 38.7 Forward link paging channel encoder (Khalife et al. [18]; 3GPP2 [50]).
Source: Reproduced with permission of IEEE.
The paging channel message is divided into 80 ms time slots, where each slot is composed of eight half‐frames. All the half‐frames start with a synchronized capsule indicator (SCI) bit. A message capsule can be transmitted in both a synchronized and an unsynchronized manner. A synchronized message capsule starts exactly after the SCI. In this case, the BTS sets the value of the first SCI to one and the rest of the SCIs to zero. If by the end of the paging message capsule there remains fewer than 8 bits before the next SCI, the message is zero‐padded to the next SCI. Otherwise, an unsynchronized message capsule is sent immediately after the end of the previous message [46]. The paging channel structure is summarized in Figure 38.8.
38.5.1.5 Transmitted Signal Model
The pilot signal, which is purely the PN sequence, is used to acquire and track a cellular CDMA signal. The acquisition and tracking will be discussed in Section 38.5.2. Demodulating the other channels becomes an open‐loop problem, since no feedback is taken from the sync, paging, or any of the other channels for tracking. Since all the other channels are synchronized to the pilot, only the pilot needs to be tracked. In fact, it is required by the cdma2000 specification that all the coded channels be synchronized with the pilot to within ±50 ns [50]. Although signals from multiple BTSs could be received simultaneously, a UE can associate each individual signal with the corresponding BTS, since the offsets between the transmitted PN sequences are much larger than one chip. This is because the autocorrelation function has negligible values for delays greater than one chip. Therefore, the PN offsets, which are much larger than one chip delay, guarantee that no significant interference is introduced (the autocorrelation function is discussed in Section 38.5.2.3and is shown in Figure 38.13).
The normalized transmitted pilot signal s ( t ) by a particular BTS can be expressed as




where ℜ {·} denotes the real part; C is the total power of the transmitted signal; c ′ I( t ) = c I( t ) * h ( t ) and c ′ Q( t ) = c Q( t ) * h ( t ); h is the continuous‐time impulse response of the pulse shaping filter; c Iand c Qare the in‐phase and quadrature PN sequences, respectively; ω c= 2 πf c, where f cis the carrier frequency; and Δ is the absolute clock bias of the BTS from GPS time. The total clock bias Δ is defined as
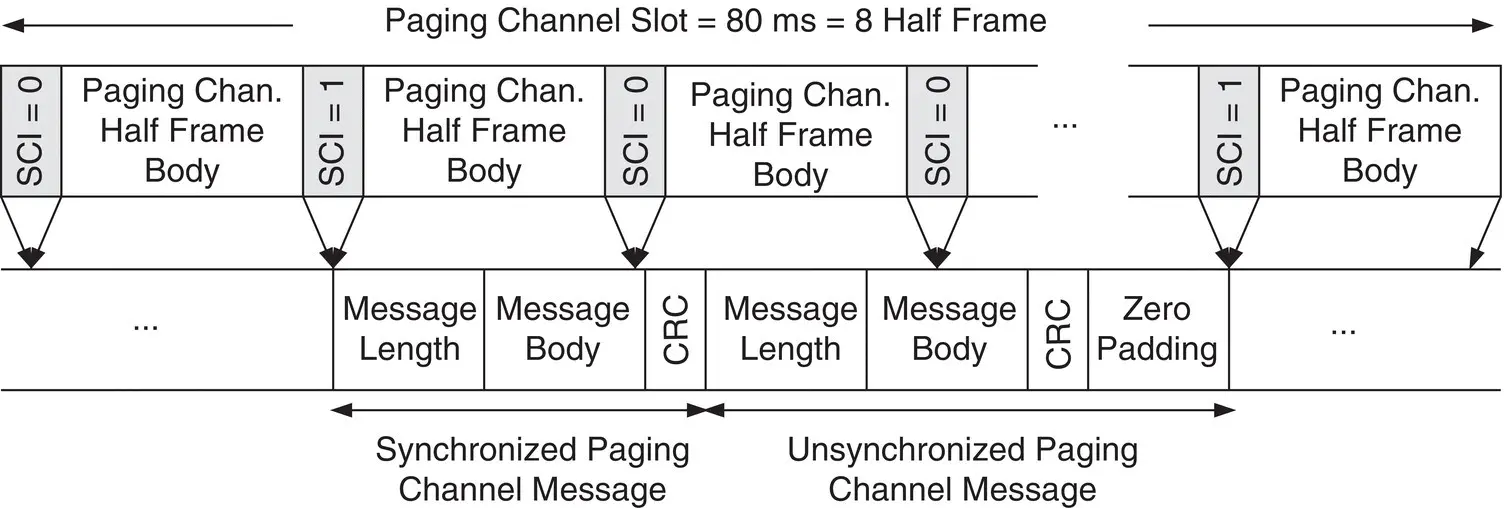
Figure 38.8 Paging channel message structure (Khalife et al. [18]; 3GPP2 [50]).
Source: Reproduced with permission of IEEE.

where PN offsetis the PN offset of the BTS,  s is the chip interval, and δt sis the BTS clock bias. Since the chip interval is known and the PN offset can be decoded by the receiver, only δt sneeds to be estimated.
s is the chip interval, and δt sis the BTS clock bias. Since the chip interval is known and the PN offset can be decoded by the receiver, only δt sneeds to be estimated.
Интервал:
Закладка:
Похожие книги на «Position, Navigation, and Timing Technologies in the 21st Century»
Представляем Вашему вниманию похожие книги на «Position, Navigation, and Timing Technologies in the 21st Century» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.











Обсуждение, отзывы о книге «Position, Navigation, and Timing Technologies in the 21st Century» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.