Patrick O. J. Kaltjob - Control of Mechatronic Systems
Здесь есть возможность читать онлайн «Patrick O. J. Kaltjob - Control of Mechatronic Systems» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Control of Mechatronic Systems
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Control of Mechatronic Systems: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Control of Mechatronic Systems»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
unites the two systems, revisiting the concept of automated control by presenting a unique practical methodology for whole-system integration. With its innovative hybrid approach to the modeling, analysis, and design of control systems, this text provides material for mechatronic engineering and process automation courses, as well as for self-study across engineering disciplines. Real-life design problems and automation case studies help readers transfer theory to practice, whether they are building single machines or large-scale industrial systems.
Presents a novel approach to the integration of discrete-time and discrete-event systems within mechatronic systems and industrial processes Offers user-friendly self-study units, with worked examples and numerous real-world exercises in each chapter Covers a range of engineering disciplines and applies to small- and large-scale systems, for broad appeal in research and practice Provides a firm theoretical foundation allowing readers to comprehend the underlying technologies of mechatronic systems and processes
is an important text for advanced students and professionals of all levels engaged in a broad range of engineering disciplines.
Control of Mechatronic Systems — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Control of Mechatronic Systems», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
2 Processes characterized by discrete event operations representing different process states such as device activation or deactivation during the startup or shutdown of a turbine. Here, process variables are binary signals indicating the discrete status of devices or machines involved in process operations as well as change in logic devices (e.g. activating events resulting from ON/OFF switch positioning). The process discrete event models can be obtained through Boolean functions or logic flow charts.
3 Processes characterized by identifiable objects that are transformed, transported or stored, such as silicon-based wafer production, data processing and storage operations. Here, process variables indicate the state changes of objects and can have a continuous range of values (i.e. temperature of a slab in a clogging mill, size of a part in a store) or binary variables. Those variables can also be non-physical categories (i.e. type, design, application, depot number) assigned to the objects.
Example 1.2
Figure 1.2, depicting a salt-generating solar-based thermal power plant substation, illustrates an example of non-continuous processes (discrete event- or object-related). In this power plant, solar radiation is collected by thousands of sun-tracking mirrors (heliostats), which reflect it toward a single receiver atop a centrally located tower. Solar radiation is the electromagnetic radiation emitted by the sun. As such, it is necessary to:
1 Control the collector angle and position (sun tracker) to face the sun to collect the maximum solar radiation as well as to maintain peak power despite varying climate conditions. This is done by adjusting the operating setting based on measured voltage and current outputs of the array.
2 Logically control the energy storage by switching between charging/discharging operating modes based on climatic conditions (sun availability), battery charge status, load levels, and level of energy collected through solar irradiation by mirror arrays.
3 Control the temperature of the collector used to melt a salt. The hot molten salt is stored in a storage tank to generate steam and later used to drive the turbine and attached generator.
4 Control the flow of heated fluid circulating between the tank and the collector. This fluid with molten salt at a low temperature is pumped to the cold collector tower for the next thermal cycle. The operating temperature over this thermal cycle derives the quantity of energy to be extracted.
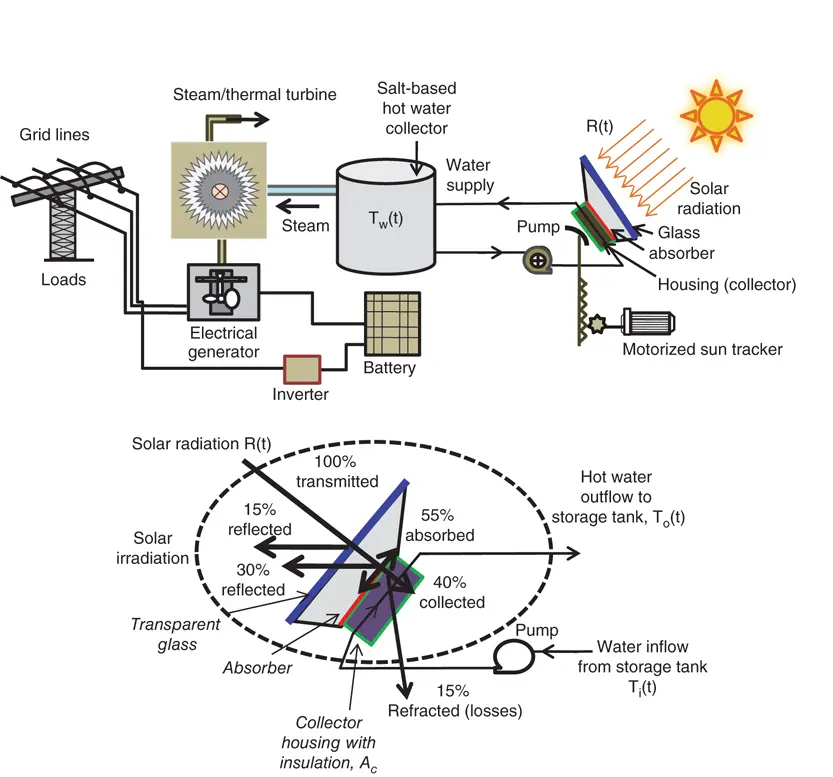
Figure 1.2 Steam-based power generation technical process schematic.
Digital control systems aim to coordinate the operations of several electrically-driven machines in order to meet specific operational objectives such as water purification, voltage control in an electrical power grid, or temperature regulation in a fermentation tank. Thus, it is usually necessary to ensure the integration of a large number of control system instruments (from data processing and computing units to measuring units). Figure 1.3illustrates the generic components in the design of computer control systems with supervisory functions. An example of the relationship between a technical process and electromechanical system control is illustrated in Figure 1.4.
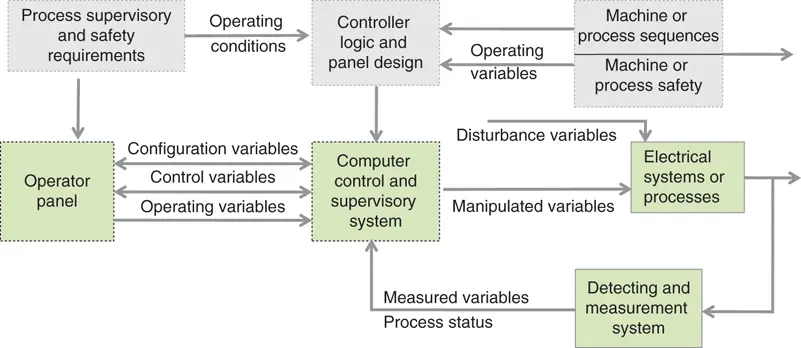
Figure 1.3 Generic controlled mechatronic systems and instrumentation block diagram.
Source: Adapted from Kaltjob P.
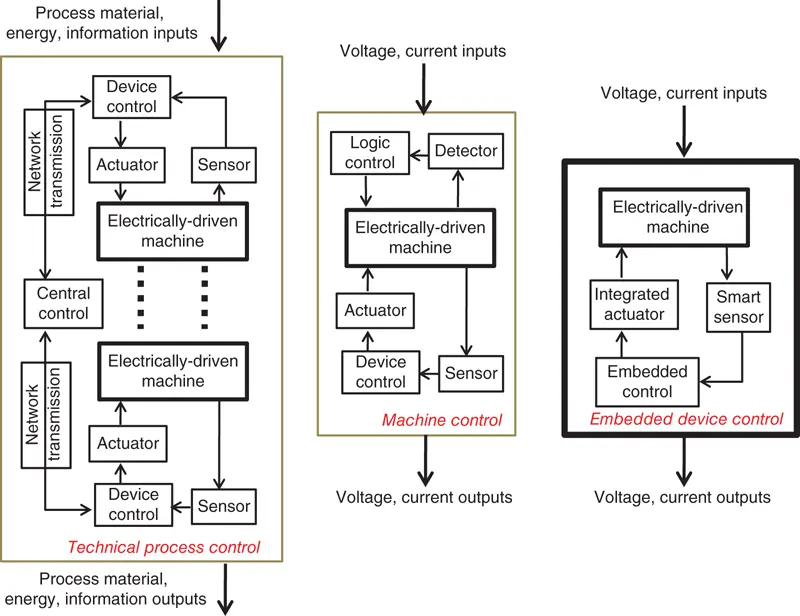
Figure 1.4 Relationship between technical process and machine control systems.
Source: Based on Kaltjob P.
1.3 Generic Controlled Mechatronic System and Instrumentation Components
Through functional system decomposition, the digital control system architecture can be divided into the following functional units: data processing and computing, electrically-driven actuating, measuring and detecting, data acquisition, transmission, and signal conditioning. All these components are presented in the subsequent subsections. Figure 1.5summarizes the connections between all the major control systems and instrumentation components.
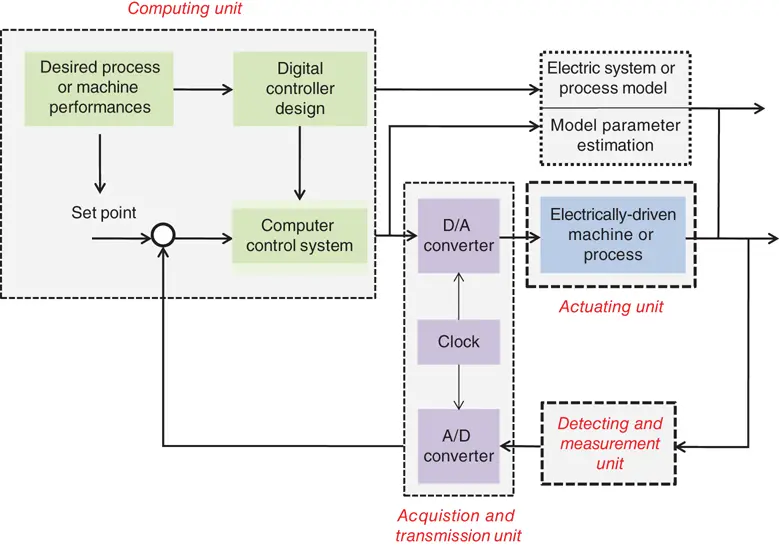
Figure 1.5 Generic control systems and instrumentation block diagram.
Source: Based on Kaltjob P.
1.3.1 The Data Processing and Computing Unit
The data processing and computing unit is used: (i) to control and regulate machine operations; (ii) to monitor machines and processes operations; and/or (iii) to coordinate operations within the same process. Data processing and computing could be performed either:
1 offline: that is, there is no direct or real-time connection between the process execution and the data processing and computing unit;
2 online for open-loop operations: that is, the protection (safety) of process operations and interlocking; or
3 online for closed-loop operations.
Commonly encountered data processing and computing devices are: digital signal processing devices, programmable logic controllers, microcontrollers, field programmable gate arrays among others, and a distributed control system (DCS) (consisting of a historian server connected to a network of field controller devices). Those devices execute program routines for: (i) the acquisition of process variables; (ii) process condition monitoring and exception handling (i.e. executing process safety operations); (iii) the control of machine operations (e.g. activation/deactivation of motor, tracking of motor speed); and (iv) the archiving and sharing of process data with other control devices through the communication network.
1.3.2 Data Acquisition and Transmission Units
Data acquisition and transmission units are used: (i) to interface with various control devices (e.g. operator panel, detecting and measuring field devices); (ii) to transport process data between network nodes; (iii) to integrate process data from different sources on a single platform; and (iv) to integrate control functions (e.g. machine control and process control). These units operate through data transfer platforms and their data distribution service protocols. They can be designed based on the Open Systems Interconnection model, which is summarized as:
1 the physical layer, being either wired or wireless connection, such as twisted-pair wiring, fiber-optic cable or radio link, and the commutation unit connecting the network to the devices (e.g. field buses for data transfer between primary controllers and field control devices);
2 the network, transmission, and transport layers performing functions such as data routing over the network, data flow control, packet segmentation and desegmentation, error control and clock synchronization. In addition, these layers provide mechanisms for packet tracking and the retransmission of failed packets; and
3 the session and presentation layers mainly used for data formatting.
1.3.3 Electrically-driven Actuating Units
Electrically-driven actuating units convert voltage or current signals from the computing unit into appropriate input forms (mechanical, electrical, thermal, fluidic etc.) for the execution of machine's and process operations. Then those converted signals produce variations in the machine's physical variables (e.g. torque, heat, or flow), or amplify the energy level of the signal, causing changes in the process operation dynamics. Some examples of actuating elements are relays, magnets, and servo motors.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Control of Mechatronic Systems»
Представляем Вашему вниманию похожие книги на «Control of Mechatronic Systems» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.









Обсуждение, отзывы о книге «Control of Mechatronic Systems» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.