Patrick O. J. Kaltjob - Control of Mechatronic Systems
Здесь есть возможность читать онлайн «Patrick O. J. Kaltjob - Control of Mechatronic Systems» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Control of Mechatronic Systems
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Control of Mechatronic Systems: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Control of Mechatronic Systems»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
unites the two systems, revisiting the concept of automated control by presenting a unique practical methodology for whole-system integration. With its innovative hybrid approach to the modeling, analysis, and design of control systems, this text provides material for mechatronic engineering and process automation courses, as well as for self-study across engineering disciplines. Real-life design problems and automation case studies help readers transfer theory to practice, whether they are building single machines or large-scale industrial systems.
Presents a novel approach to the integration of discrete-time and discrete-event systems within mechatronic systems and industrial processes Offers user-friendly self-study units, with worked examples and numerous real-world exercises in each chapter Covers a range of engineering disciplines and applies to small- and large-scale systems, for broad appeal in research and practice Provides a firm theoretical foundation allowing readers to comprehend the underlying technologies of mechatronic systems and processes
is an important text for advanced students and professionals of all levels engaged in a broad range of engineering disciplines.
Control of Mechatronic Systems — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Control of Mechatronic Systems», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
1.3.4 Measuring and Detecting Units
Measuring and detecting units consist of low-power devices, such as sensors and switch-based detectors interfacing with electrically-driven machines involved in process operations. As such, they convert related physical output signals from the actuating unit into voltage or binary signals ready to be used within the data processing and computing unit. Some key functions of these devices are: (i) data acquisition related to the change of machine variables; and (ii) conversion of the machine-gathered signal into electrical or optical signals. Depending on the nature of the process signal generated, a signal conditioner can be added.
1.3.5 Signal Conditioning Units
Signal conditioning elements convert the nature of the signal generated by the sensing device into another suitable signal form (usually electrical). The signal conditioning units can also be embedded within the sensing devices. An example of such a unit is a Resistance Temperature Detector (RTD). Here, a change in the temperature of its environment is converted into a voltage signal reflecting its resistance change through a Wheatstone bridge and the bridge is a signal conditioning module.
1.4 Functions and Examples of Controlled Mechatronic Systems and Processes
Mechatronic systems and processes have built-in intelligence through either their advanced information processing systems such as multifunctional control systems or intelligent electromechanical systems (including thermal, fluid, and mechanical processes) such as power-efficient multi-axis actuation with motion precision and detection features or miniaturized smart devices with embedded information processing capabilities. The resulting controlled mechatronic systems and processes aim to achieve various objectives: synchronize, control and sequence process operations, or detect and monitor process status.
Table 1.1presents some typical process control objectives and their corresponding control functions along with some illustrative examples.
Table 1.1 Functions and implementation strategies for controlling mechatronic systems and processes.
| Control system processing functions | Implementation control strategies | Examples of controlled mechatronic systems and processes |
|---|---|---|
| Assessing, reporting, and monitoring | Recording process variables through sensors and detectors; real-time, model-based measurement, setting parameters, and input signals. | Remote power flow measurement, configuration and voltage control (SCADA) through switchgears, transformers, and condensers in a smart power grid. |
| Safety compliance, detection, and diagnostics | Interlocking in case of detected failure modes, maintaining safety operations while ensuring malfunction handling. | Integrated safety and monitoring of petrochemical process variables and parameters (flowrate, temperature etc.) |
| Control and performance enhancement | Controlling or regulating system variables. | Position and temperature measurement as well as control of a 2D cutting machinery process. |
Example 1.3
Robot-assisted surgery is using image-guided systems to command and control operations in intravascular surgery, as depicted in Figure 1.6. Such a system has an embedded and integrated control system for its motion and direction, as well as operation monitoring, and motion synchronization between robot arms. Expected control functions include:
1 force control of a robot arm gripper;
2 synchronized angular position and velocity control of each motor-driven robot joint;
3 logic control of real-time anomalies detection (location of the abnormal cell or dysfunctional organ) and inspection using 3D imaging camera processing (color uniformity, selection based on size and shape) and laser ranging sensors;
4 path generation and motion planning (position, speed, and accelerations) for robot navigation while ensuring collision avoidance of the robot manipulator; and
5 logic control of the discrete selection of suitable cutting tools for the robot arms.
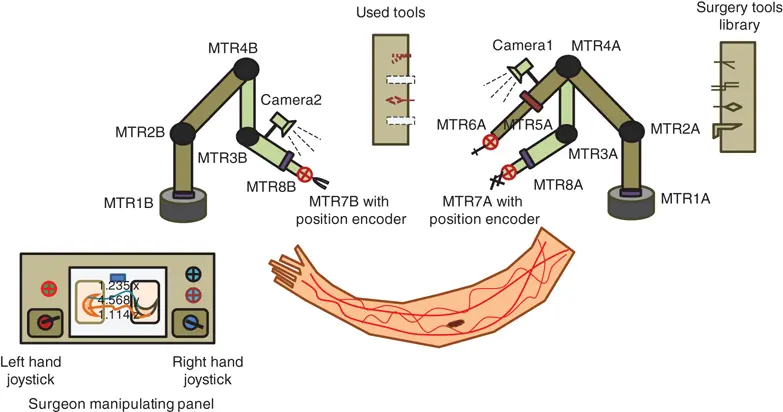
Figure 1.6 Image-guided tele-assisted robot intravascular surgery.
Example 1.4
An unmanned electric vehicle driving system is expected to have an embedded and integrated control system for speed and direction control, traffic light monitoring, and motion synchronization with other users. Consider the driverless vehicle in Figure 1.7(a): a block diagram with all relevant input and output (I/O) variables involved is depicted in Figure 1.7(b).
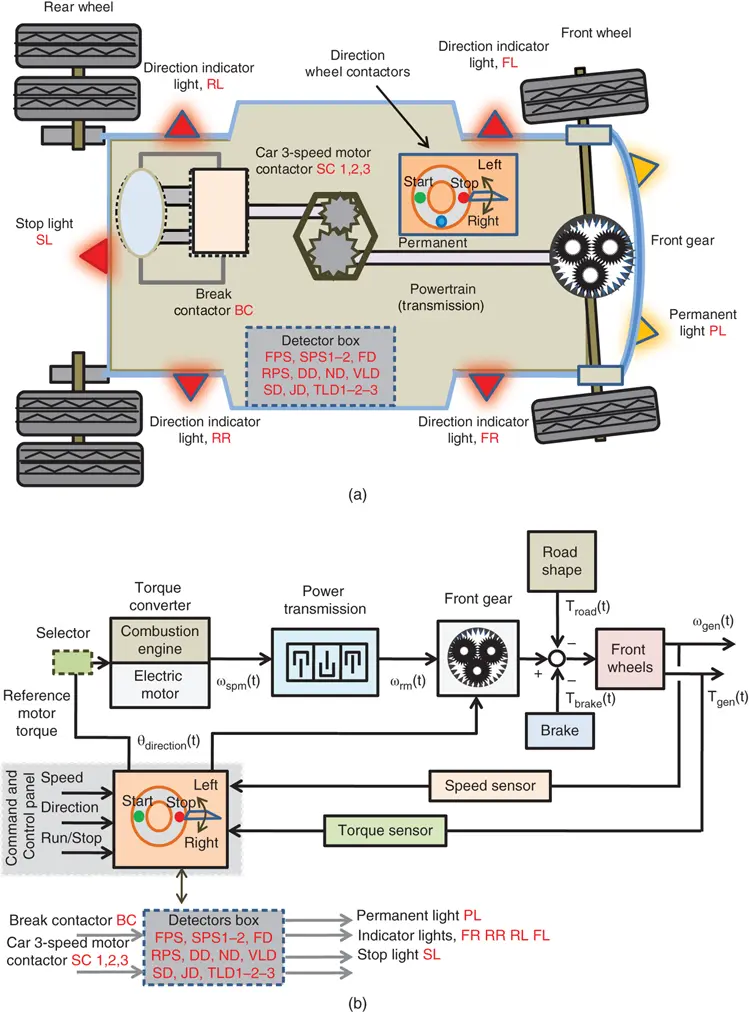
Figure 1.7 (a) Chassis of a driverless vehicle. Source: Based on Kaltjob P. (b) Hybrid control block diagram of a driverless vehicle.
Example 1.5
Here, an example of control system for a crane-based vertical motion process is illustrated in Figure 1.8, while its feedback block diagram and the logic control connections are shown in Figure 1.9(a) and (b).
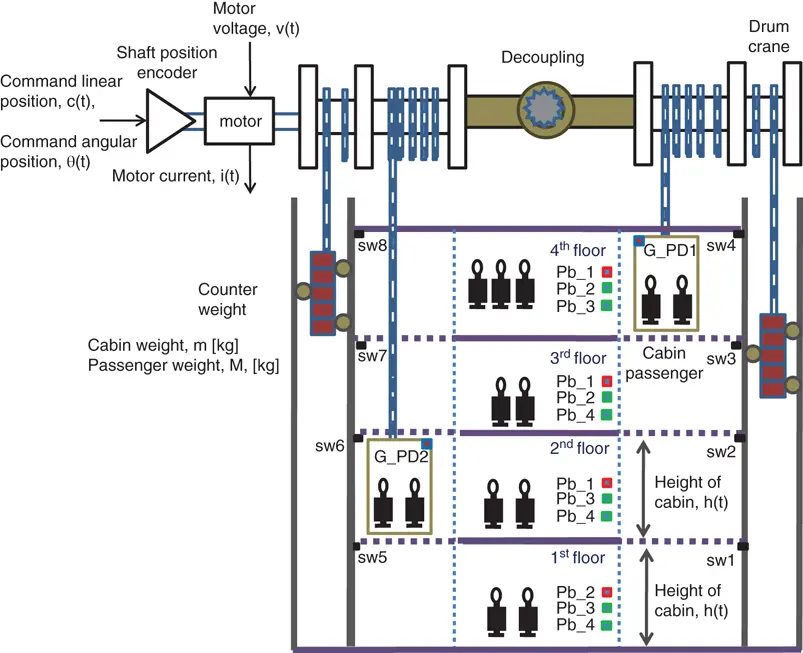
Figure 1.8 Crane-based vertical motion control system schematic.
Source: Adapted from Kaltjob P.
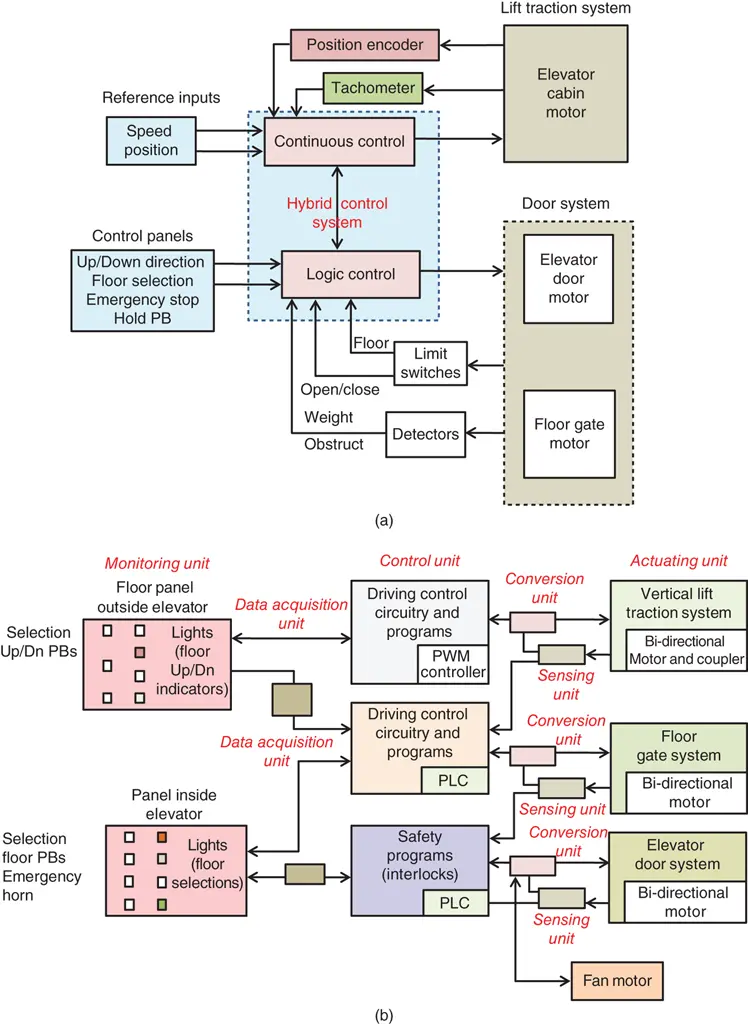
Figure 1.9 (a) Block diagram of the crane motion feedback control system. (b) Logic control connections of the crane motion feedback control system.
Example 1.6
Here, a milky beverage processing factory is illustrated in Figure 1.10. In a process of such scale, a supervisory, control, and data acquisition system (SCADA) is used to collect plant-wide data through an industrial network to archive and to ensure the execution of derived process sequences. The equivalent block diagram depicting the relevant components of such SCADA-oriented process control system is presented in Figure 1.11.
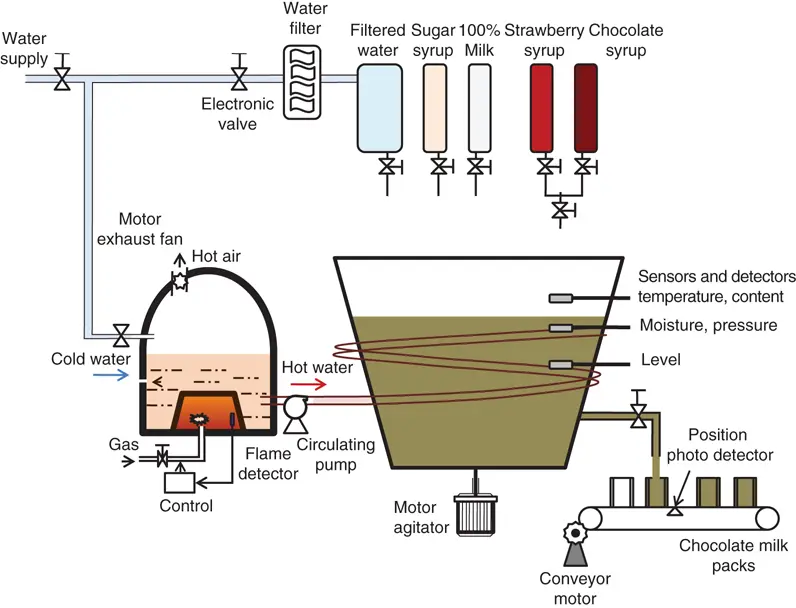
Figure 1.10 Milk-based beverage processing factory schematic.
Source: Based on Kaltjob P.
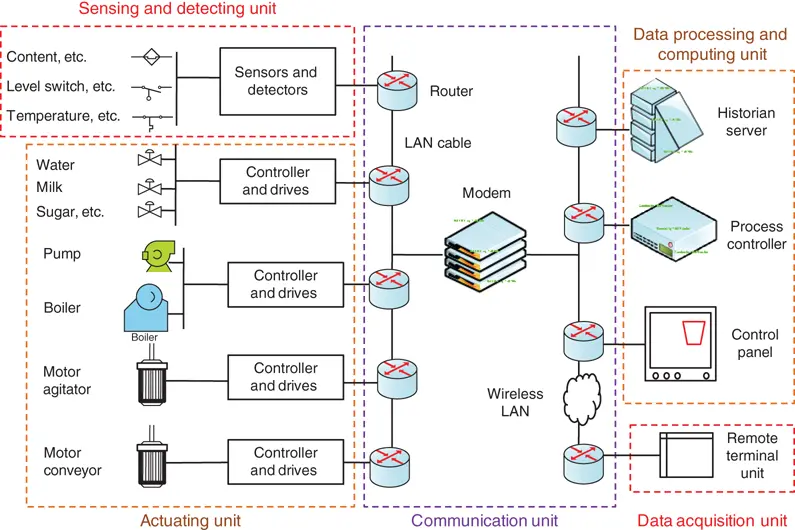
Figure 1.11 Block diagram with SCADA components for a milk-based beverage processing system.
Source: Based on Kaltjob P.
1.5 Controller Design Integration Steps and Implementation Strategies
Mechatronic systems and processes are systems embedding automatic information processing functions such as for reporting, better performance and control, and safe operation. Such functions are implemented using various control strategies through advanced control design algorithms, along with associated smart actuating or sensing devices. Because a combination of control strategies is commonly used and operated simultaneously, it is necessary to develop a design methodology to integrate control strategies with information-driven processing functions to ensure near-optimal performance under various functionalities and safe operating conditions. In addition, the control system must combine digital logic sequential control with continuous control to ensure a synergetic effect on the operation of the mechatronic system. This is usually encapsulated in an automation software solution associated with solid state computing devices (power electronics).
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Control of Mechatronic Systems»
Представляем Вашему вниманию похожие книги на «Control of Mechatronic Systems» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.









Обсуждение, отзывы о книге «Control of Mechatronic Systems» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.