Mohamed-Aymen Chalouf - Intelligent Security Management and Control in the IoT
Здесь есть возможность читать онлайн «Mohamed-Aymen Chalouf - Intelligent Security Management and Control in the IoT» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Intelligent Security Management and Control in the IoT
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Intelligent Security Management and Control in the IoT: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Intelligent Security Management and Control in the IoT»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Intelligent Security Management and Control in the IoT — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Intelligent Security Management and Control in the IoT», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Unlike classical reinforcement learning problems, the optimum is known here and given by equation [2.2]. The revenue is given by equation [2.6]:
[2.6] 
The revenue is therefore maximal when the chosen action makes it possible to obtain a number of devices attempting access  equal to the optimum
equal to the optimum  . However, as the measurement
. However, as the measurement  is marred by noise, this impacts the measured revenue.
is marred by noise, this impacts the measured revenue.
The objective of such a system is to find the blocking probability, making it possible to maximize the average recompense, which amounts to reducing the distance between the measurements of the number of terminals attempting access and the optimum. To meet this objective, we rely on the TD3 algorithm.
The TD3 algorithm is an actor-critic approach, where the actor is a network of neurons which decides the action to take in a particular state; the main network makes it possible to know the value of being in a state and to choose a particular action. TD3 makes it possible to resolve the question of over-evaluation in estimating the value (Thrun and Schwartz 1993) by introducing two critical networks and by taking the minimum between these two estimations. This approach is particularly beneficial in our case due to the inherent presence of measurement errors.
2.5.2. Regulation system for arrivals
The diagram in Figure 2.6 describes the system that makes it possible to control the number of attempts from IoT objects. This system is based on the diffusion of the blocking factor at the terminals, through the SIBs which are broadcasted, and more particularly through the Type14 SIB block, which makes it possible to diffuse the access blocking parameters (ETSI 2019).
Following the reception of the blocking factor, the terminals wishing to carry out transmission execute the ACB, which allows them to pass to the following stages with a probability p , which is calculated by our TD3 based controller. These terminals can, consequently, attempt access by choosing a preamble at random from among the available preambles. Knowing the state of the preambles, the gNodeB can estimate the number of attempts made. This measure is very noisy, since the model given only makes it possible to estimate averages. We take an average estimate of the number of devices. We use a sliding average to do this.
The controller, we have proposed, receives these measurements, augmented from the revenue, at the end of each preamble. The revenue obtained enables it to know the quality of the actions taken. These different data are placed in a memory of past experiences. This is a random sub-set of this memory that will enable it to learn robustly and to choose, subsequently, a new action.
These different actions are repeated cyclically.
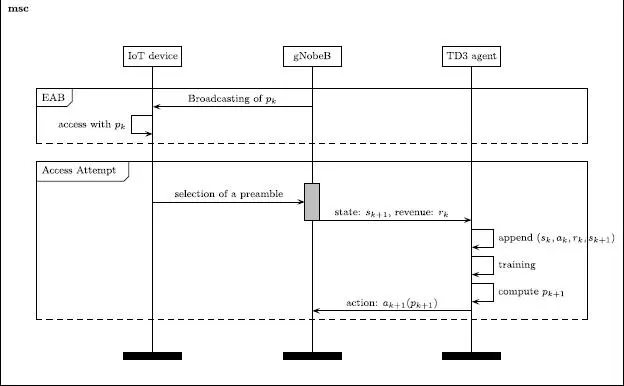
Figure 2.6. System for regulating arrivals
2.6. Performance evaluation
After having described our access controller proposition, in this section we evaluate its performances, using a simulation environment that we have built in Simpy (2020).
We have considered an NB-IoT antenna in which access requests arrive according to a Poisson distribution with an average rate between two arrivals of 0.018 s. We have considered a number of preambles N equal to 16, with an arrival frequency equal to 0.1 s. In the system considered, each device attempting access will be able to do so a maximum of 16 times. Beyond this limit, the terminal abandons transmission.
Our controller’s performance, which is based on the TD3 technique, is compared to an adaptive approach. We have considered a measurement horizon H equal to 10. Use of a larger measurement window does not allow a significant improvement in performances, which means that a window of 10 measurements makes it possible to reflect sufficiently the real state of the network.
The adaptive approach consists of gradually increasing the blocking probability when the number of attempts is beyond a predefined threshold above the optimal value. When a value is below a predefined threshold below the optimal value, the blocking probability is gradually reduced, to allow more terminals to attempt access.
In Figures 2.7 and 2.8, the blocking probabilities for both strategies considered are expressed. The adaptive technique (Figure 2.7) starts with an access probability of 1 and adapts itself according to the traffic conditions, which change following a Poisson distribution. For the strategy, which is based on the TD3 algorithm, there is an initial stage lasting 200 s, where the algorithm tries to explore the action space according to a uniform law (Figure 2.8). It is only after this stage that the algorithm begins to make use of its learning, which is refined in line with its experiences.
We can note that under TD3 (Figure 2.8), future actions have no links with past actions, unlike the adaptive case. In fact, the values of the actions can change completely, because they depend only on the state of the network, which can change very quickly.
Figures 2.9 and 2.10 describe the impact of control laws, described previously, on the average latency of the access attempts. In these plots, we do not consider the terminals that have abandoned transmission of sets of a number of maximum attempts. Even though we can note, in Figure 2.10, some terminals with latencies slightly higher than those in Figure 2.9, the latency is globally of the same order, that is, the TD3 algorithm does not show any advantage in terms of latency.
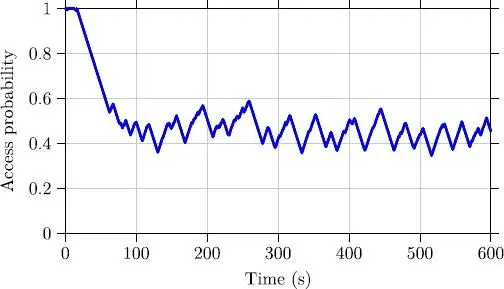
Figure 2.7. Access probability with the adaptive controller
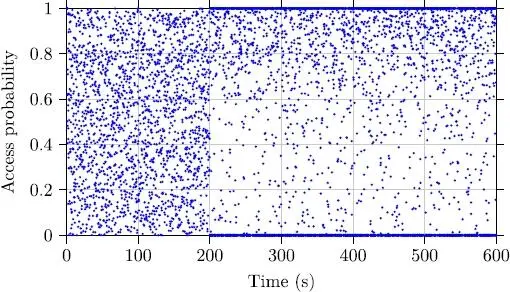
Figure 2.8 Access probability with the controller using TD3
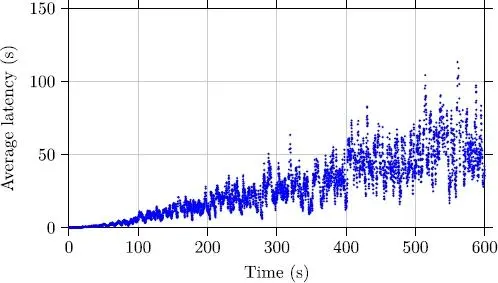
Figure 2.9. Average latency of the terminals with the adaptive controller
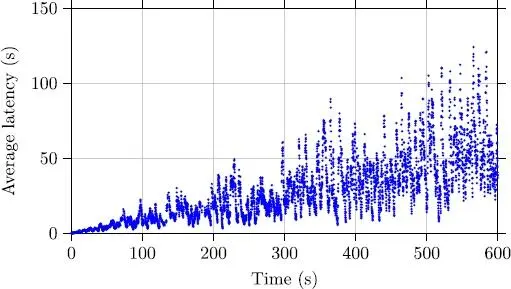
Figure 2.10. Average latency of the terminals with the controller using TD3
Even though TD3 does not show any particular advantage in terms of latency, we can see in Figure 2.12 that after an exploration stage, the revenue improves very significantly. This recompense is clearly higher than for the adaptive controller, which shows a reduced and very variable recompense (Figure 2.11). In fact, the average of the recompense in TD3 is in the order of 13.91%, while the adaptive controller shows a recompense in the order of 3.6%. This recompense reflects the fact that under TD3, the average number of terminals attempting access gets closer to the optimum. This result, perhaps also shown in Figure 2.14, shows that the number of attempts with TD3 is closer still to the optimum which is equal to 15.49. In fact, the average number of attempts using the adaptive controller is equal to 30.12 (Figure 2.13), while it is equal to 19.6 for our approach.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Intelligent Security Management and Control in the IoT»
Представляем Вашему вниманию похожие книги на «Intelligent Security Management and Control in the IoT» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.









Обсуждение, отзывы о книге «Intelligent Security Management and Control in the IoT» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.