Олег Ширяев - Устройство и эксплуатация зенитной самоходной установки ЗСУ-23-4 «Шилка»
Здесь есть возможность читать онлайн «Олег Ширяев - Устройство и эксплуатация зенитной самоходной установки ЗСУ-23-4 «Шилка»» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. ISBN: , Издательство: Казахский национальный университет имени аль-Фараби Литагент, Жанр: foreign_edu, Детская образовательная литература, military_special, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Устройство и эксплуатация зенитной самоходной установки ЗСУ-23-4 «Шилка»
- Автор:
- Издательство:Казахский национальный университет имени аль-Фараби Литагент
- Жанр:
- Год:неизвестен
- ISBN:978-601-04-2468-5
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Устройство и эксплуатация зенитной самоходной установки ЗСУ-23-4 «Шилка»: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Устройство и эксплуатация зенитной самоходной установки ЗСУ-23-4 «Шилка»»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Может быть использовано в войсках для подготовки офицерского состава и номеров расчетов подразделений ПВО СВ.
2-е издание
Устройство и эксплуатация зенитной самоходной установки ЗСУ-23-4 «Шилка» — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Устройство и эксплуатация зенитной самоходной установки ЗСУ-23-4 «Шилка»», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Пределы работысистемы стабилизации:
– по углу продольной качки самохода (углу галопирования) Ψ – ± 10°;
– по углу поперечной качки самохода (углу потаптывания) θ – ± 10°;
– по углу курса К ЗСУ – неограниченно.
4.2. Устройство и принцип действия гироазимутгоризонта
Гироазимутгоризонт (ГАГ)– центральный прибор системы стабилизации, предназначен для измерения углов продольной и поперечной качки Ψ, θ, а также угла курса К установки (рис. 4.8).
Основой ГАГ является гироскоп.Это устройство с быстро вращающимся вокруг своей оси ротором. Скорость вращения составляет около 30 000 оборотов в минуту. За счет этого ось вращения сохраняет приданное ей первоначальное направление и остается неизменным в пространстве, несмотря на повороты и различные перемещения корпуса гироскопа.
При работе ГАГ создается горизонтальная стабилизированная площадка (гирогоризонт),относительно которой измеряются углы продольной и поперечной качки Ψ, θ. Кроме этого, ГАГ создает неподвижное ориентированное направление (гироазимут),относительно которого измеряется угол курса К установки.
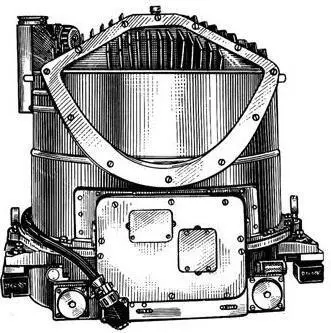
Рис . 4 . 8 .Гироазимутгоризонт
Измеренные углы в виде электрических напряжений поступают в орудийный и визирный преобразователи координат для стабилизации линии визирования и линии выстрела.
4.3. Принцип работы системы стабилизации
Работа системыстабилизации заключается в следующем (рис. 4.9).
РЛС 1РЛ33 сопровождает воздушную цель и определяет ее координаты – β, ε и Д, которые поступают в СРП. СРП решает задачу встречи снаряда с целью и определяет координаты упрежденной точки – βу и φ.
Эти координаты поступают в орудийный преобразователь координат.Туда же с ГАГ поступают углы продольной и поперечной качки самохода Ψ, θ, а также со следящей системы К – угол курса К.
ОПК вырабатывает полные углы вертикального и горизонтального наведения пушки Ф и Q, которые отрабатываются приводами наведения. В результате этого стволы пушки постоянно наводятся в упрежденную точку с учетом углов поперечной и продольной качки самохода.
В визирный преобразователь координатс антенны РЛС поступают угловые координаты цели – β и ε. Кроме этого, туда же поступают углы продольной и поперечной качки самохода Ψ, θ и угол курса К.
ВПК вырабатывает углы поворота антенны Δε и Δq. Эти углы отрабатываются следящими приводами стабилизации Δε и Δq, тем самым ось антенны удерживается неподвижной относительно земли при продольной и поперечной качке ЗСУ.
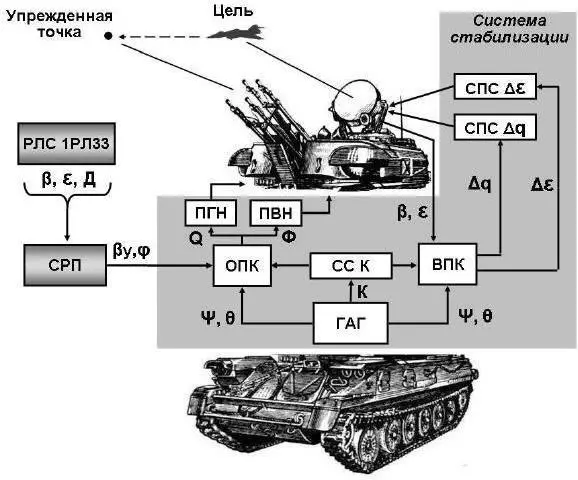
Рис . 4 . 9 .Функциональная схема системы стабилизации

5. СИЛОВЫЕ ПРИВОДЫ НАВЕДЕНИЯ ЗСУ-23-4
5.1. Назначение, состав и технические данные силовых приводов наведения
Силовые электрогидравлические приводы наведения 2Э2предназначены для наведения пушки АЗП-23 по азимуту β и углу возвышения φ при работе в автоматическом режиме, по данным РПК, и в полуавтоматическом режиме – от блока управления антенной Т-55.
В составприводов наведения входят (рис. 5.1):
– привод горизонтального (ГН) и вертикального наведения (ВН), каждый из которых состоит из:
– измерительного устройства;
– управляющего устройства;
– исполнительного устройства;
– стабилизирующего устройства;
– компенсирующего устройства;
– ограничитель углов (ОГ);
– ограничитель углов нижний (ОГН);
– аппаратура управления, коммутации и контроля;
– пополнительный бак гидросистемы;
– блок питания приводов.
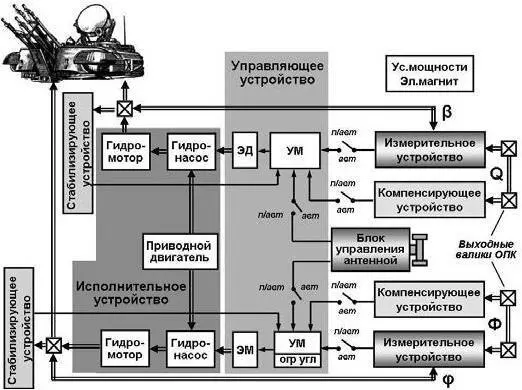
Рис . 5 . 1 .Функциональная схема системы гидроприводов
Технические данные приводов:
– максимальная скорость наведения АЗП-23:
по азимуту – до 70°/с;
– по углу возвышения – до 60°/с;
– статическая ошибка – не более 0-02;
– приводы обеспечивают:
а) переброску пушки:
– по азимуту на 28-00 – не более 6 с;
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Устройство и эксплуатация зенитной самоходной установки ЗСУ-23-4 «Шилка»»
Представляем Вашему вниманию похожие книги на «Устройство и эксплуатация зенитной самоходной установки ЗСУ-23-4 «Шилка»» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




Обсуждение, отзывы о книге «Устройство и эксплуатация зенитной самоходной установки ЗСУ-23-4 «Шилка»» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.