Сергей Макаренко - Противодействие беспилотным летательным аппаратам
Здесь есть возможность читать онлайн «Сергей Макаренко - Противодействие беспилотным летательным аппаратам» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Санкт-Петербург, Год выпуска: 2020, ISBN: 2020, Издательство: Издательство «Наукоемкие технологии» OOO «Корпорация «Интел Групп», Жанр: Технические науки, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Противодействие беспилотным летательным аппаратам
- Автор:
- Издательство:Издательство «Наукоемкие технологии» OOO «Корпорация «Интел Групп»
- Жанр:
- Год:2020
- Город:Санкт-Петербург
- ISBN:978-5-6044793-6-0
- Рейтинг книги:4.67 / 5. Голосов: 3
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Противодействие беспилотным летательным аппаратам: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Противодействие беспилотным летательным аппаратам»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Материалы работы предназначены для научных сотрудников, соискателей ученых степеней, военных и технических специалистов, занимающихся вопросами противодействия БПЛА.
Отдельные результаты, представленные в данной монографии, получены в рамках госбюджетной темы НИР СПИИРАН № 0073-2019-0004.
Противодействие беспилотным летательным аппаратам — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Противодействие беспилотным летательным аппаратам», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Рис. 1.5. Примеры малых БПЛА-квадрокоптеров, предположительно подобных тем, которые атаковали Президента Венесуэлы Н. Мадуро 4 августа 2018 г.
Образцы малоразмерных разведывательных БПЛА имеют взлетную массу от 2–3 кг (БПЛА «Пума», «Драгон Ай», «Скайлайт» и др.), до 15–30 кг («Интегратор», «Луна Х-2000»). При этом полезная нагрузка этих БПЛА составляет от 0,2–0,4 до 2–3 кг, а радиус действия до 10–20 км. Эти БПЛА ведут оптико-электронную разведку (ОЭР) и находятся на вооружении штабных, мотопехотных (пехотных или танковых) батальонов, а также артиллерийских дивизионов механизированных (танковых, пехотных, воздушно-десантных или воздушно-штурмовых) бригад, дивизий и армейских корпусов. Они также применяются в составе армейской авиации и в силах специальных операций [31].
1.5. Краткая характеристика бортового оборудования БПЛА
В состав БПЛА входят следующие основные системы:
— планер (несущая конструкция);
— двигательная установка;
— система электроснабжения;
— система управления;
— навигационная система;
— телеметрическая система;
— система радиосвязи.
Взаимосвязь основных подсистем БПЛА представлено на рис. 1.6.
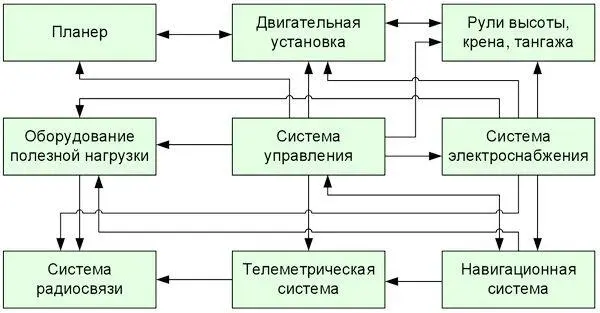
Рис. 1.6. Взаимосвязь основных подсистем БПЛА
В зависимости от перечня решаемых задач на борту БПЛА могут дополнительно устанавливаться следующие системы и устройства [32]:
— системы оптико-электронной, тепловизионной, радиолокационной, радио- и радиотехнической, радиационной, химической, бактериологической и других видов разведки с малогабаритным накопителем разведанных;
— средства постановки активных радиоэлектронных помех;
— устройства наведения и коррекции управляемого оружия («подсветки» целей);
— средства поражения, различных типов;
— средства управления и связи с наземным пунктом управления;
— ответчик системы госопознавания;
— аппаратура автономного полета и автоматической посадки;
— транспортные кассеты, отсеки, крепления и т. д.
1.5.1. Двигательная установка
Как правило, двигательная установка малых БПЛА самолетного типа, представляет собой турбовинтовой двигатель, который в общих принципах соответствует двигательная установке пилотируемых ЛА [33].
Вместе с тем, в последнее время в качестве БПЛА получили широкое распространение малые БПЛА вертолетного типа, так называемые «мультикоптеры», «квадрокоптеры», «дроны». Для данных БПЛА характерно использование установки принципиально иного рода — на основе использования 4, 6 или большего количества двигателей.
В качестве двигателей малых БПЛА вертолетного типа применяют двигатели двух типов [34]:
— коллекторные — обмотки находятся на роторе (вращающейся части);
— бесколлекторные — обмотки находятся на статоре (неподвижной части).
Бесколлекторные двигатели (BLDC-двигатели) не используют щеток и коллекторов и при наличии хороших подшипников требуют минимального технического обслуживания. Ротор BLDC-двигателей изготавливается из постоянного магнита и не имеет обмоток. Статор содержит обмотки, переменное поле которых приводит к вращению ротора [35].
Управление двигателями осуществляется с помощью задания направления и скорости вращения винтов через подключаемые к ним электронные регуляторы скорости ESC (Electric Speed Controller). На вход ррегуляторов подается напряжение с аккумулятора и управляющие сигналы с микроконтроллера, на выход регулятор отдает напряжение для привода [36].
Увеличением числа оборотов винтов в единицу времени задается подъем, уменьшением — опускание. Увеличение оборотов двух боковых винтов задает крен, а передних или задних — тангаж с последующим движением в сторону или подъемом/снижением по косой соответственно, а винтов, расположенных на одной из косых осей, — разворот аппарата влево или вправо (рыскание). Для стабилизации движения одна пара винтов всегда вращается по часовой стрелке, другая — против (рис. 1.7), компенсируя этим крутящий момент [37].
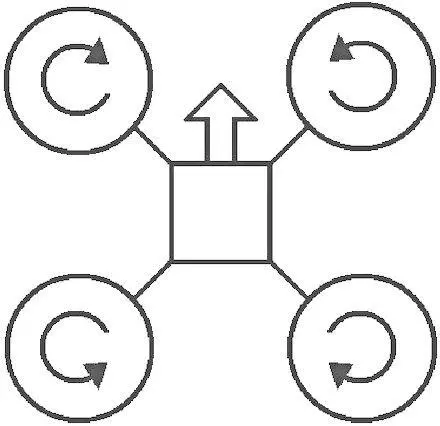
Рис. 1.7. Вращение винтов малых БПЛА вертолетного типа [38]
1.5.2. Система управления
По способам управления БПЛА декомпозируют на:
— автономные;
— полуавтономные;
— управляемые.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Противодействие беспилотным летательным аппаратам»
Представляем Вашему вниманию похожие книги на «Противодействие беспилотным летательным аппаратам» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.






Обсуждение, отзывы о книге «Противодействие беспилотным летательным аппаратам» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.