Вадим Мацкевич - Занимательная анатомия роботов
Здесь есть возможность читать онлайн «Вадим Мацкевич - Занимательная анатомия роботов» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 1998, ISBN: 1998, Издательство: Радио и связь, Жанр: Технические науки, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Занимательная анатомия роботов
- Автор:
- Издательство:Радио и связь
- Жанр:
- Год:1998
- Город:Москва
- ISBN:5-256-00037-3
- Рейтинг книги:5 / 5. Голосов: 2
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Занимательная анатомия роботов: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Занимательная анатомия роботов»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Занимательная анатомия роботов — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Занимательная анатомия роботов», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Голову робота поворачивают также электродвигатель с редуктором. Всюду в модели установлены конечные выключатели, определяющие пределы перемещения ног, рук и головы.
Конструирование роботов – манипуляторов
Многие наши школьники уже самостоятельно конструируют промышленных роботов – разумеется, в кружках под руководством специалистов. Так, школьники из Подмосковья (г. Электросталь) не так давно изготовили механическую руку (рис. 90). Рука робота укреплена на самодвижущейся тележке. Управляют рукой и тележкой с пульта дистанционно. Устройство предназначено для работы в токсичной среде.

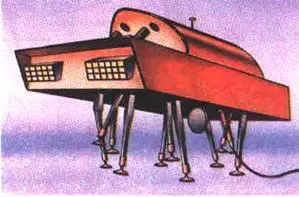
Ребятами созданы многочисленные модели стопоходящих роботов, оснащённых манипуляторами. На рис. 91 показана действующая модель космического шагохода «Марс-1», разработанного учащимися Одессы.
Если вы займётесь конструированием моделей манипуляторов, то вам помогут некоторые типовые конструкторские решения индустриальной робототехники, с которыми мы сейчас познакомимся.
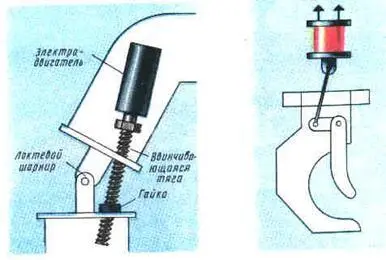
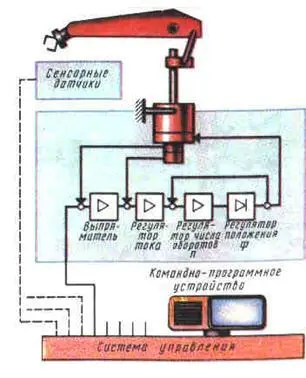
Системы привода современных манипуляторов. Современные системы привода промышленных манипуляторов примерно в 20% случаев пневматические, в 50% – гидравлические и в 30% – электрические. Гидравлический привод целесообразен в манипуляторах, оперирующих большими массами, пневматический, как более скоростной, – в схватывающих устройствах. Электрический привод удобнее использовать в обучающихся роботах, выполняющих различные рабочие операции (рис. 92). Он, как правило, состоит из тиристорного или транзисторного устройства питания
‹-› Устройство поступательного движения ‹поворотное устройство
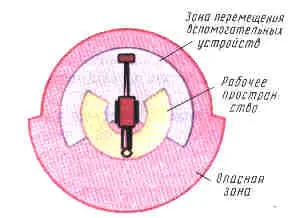
Рабочие зоны манипулятора и зоны опасности. Зоны действия манипулятора (рис. 93) – это рабочее пространство, зона перемещения вспомогательных устройств манипулятора (его направляющих, противовесов и т.д.) и зона опасности. При налаживании манипулятора определяют его запрограммированное рабочее пространство, размеры которого меняются от задачи к задаче.
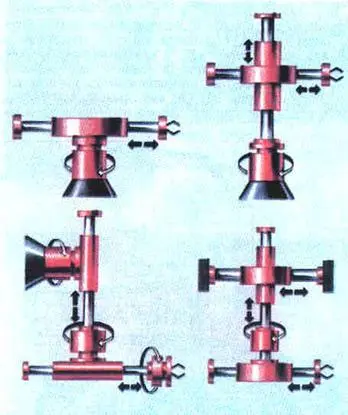
Структура манипулятора в зависимости от его размещения на рабочем месте. Из рис. 94 видны возможные варианты установки манипулятора и характер движения его основных элементов в различных условиях. Стрелки на рисунке показывают виды движения устройств манипулятора.
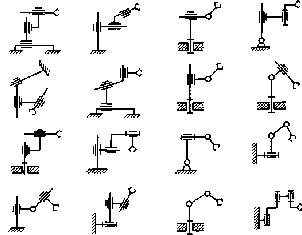
На рис. 95 приведены примеры кинематических схем различных вариантов манипуляторов.
Рабочие органы промышленных роботов
Рабочие органы промышленных роботов предназначены для захвата, удержания изделия и перемещения его при выполнении технологических операций. В соответствии с назначением все рабочие органы можно разделить на две группы: рабочие органы типа схвата и технологические рабочие органы. К первой группе относят механические с жёсткими или пружинными губками, вакуумные, электромагнитные и струйные схваты, а ко второй – клещи для контактной точечной сварки, горелку для электродуговой сварки, распылитель для окраски, специальные инструменты.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Занимательная анатомия роботов»
Представляем Вашему вниманию похожие книги на «Занимательная анатомия роботов» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.

![Айзек Азимов - Робот, который видел сны [Сны роботов]](/books/340771/ajzek-azimov-robot-kotoryj-videl-sny-sny-robotov-thumb.webp)




Обсуждение, отзывы о книге «Занимательная анатомия роботов» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.