Вадим Мацкевич - Занимательная анатомия роботов
Здесь есть возможность читать онлайн «Вадим Мацкевич - Занимательная анатомия роботов» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 1998, ISBN: 1998, Издательство: Радио и связь, Жанр: Технические науки, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Занимательная анатомия роботов
- Автор:
- Издательство:Радио и связь
- Жанр:
- Год:1998
- Город:Москва
- ISBN:5-256-00037-3
- Рейтинг книги:5 / 5. Голосов: 2
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Занимательная анатомия роботов: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Занимательная анатомия роботов»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Занимательная анатомия роботов — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Занимательная анатомия роботов», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
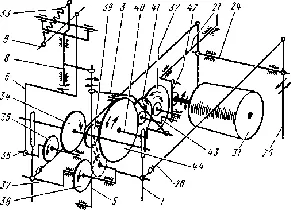
Тягу хвоста 21 приводит в движение шестерня 41, кривошип 43 и тяга 42, а тягу 5 головы – рычаг 3, прикреплённый к валу шестерни 44. Несущим элементом конструкции является шасси 27 (см. рис. 82), на котором установлены редуктор 30, электродвигатель 31 и все остальные детали. Они закрыты кожухом. Шасси и большая часть деталей механизма изготовлены из листовой стали толщиной 0,8 мм. К шасси вдоль ребра жёсткости в месте сгиба припаяна накладка. Тяги 6 и 26 изготовлены из стальной проволоки диаметром 1,5 и 2,5 мм соответственно. На концах всех тяг просверлены отверстия, в которые вставлены шплинты из проволоки. Большинство деталей конструкции фиксировано винтами М2.
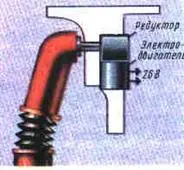
Редуктор – самодельный, изготовлен из шестерён от старых игрушек. Ведомая шестерня 32 редуктора сцеплена с электродвигателем шестернёй диаметром 7 мм, насаженной на его вал. Боковые стенки редуктора изготовлены из листовой стали толщиной 1 мм. Их крепят тремя винтами М2,5. На винты между пластинами надевают металлические втулки с наружным диаметром 4,5 мм и длиной 15 мм. Кривошипы, надеваемые на валы, сделаны из латуни (или из дюралюминия).
Батарею 3336, питающую электродвигатель, крепят на шасси двумя скобами 20 (см. рис. 82), а монтажные платы 16, 18 дешифратора – на пластмассовых стойках 17 и 19. В игрушке используется электродвигатель ДИ1 – 3 14МО 390 001 ТУ. По сравнению с другими аналогичными двигателями он обладает повышенной мощностью, высоким КПД, низким уровнем акустических шумов и радиопомех.
Пищалка 10 сделана из плотного картона и оклеена калькой. Внутри закреплена распорная пружина из стальной проволоки диаметром 0,5 мм. Звук издаёт металлическая пластина толщиной около 0,08 мм, вибрирующая под действием струи воздуха, входящего в полость пищалки. Крепят её к стойке 11, припаянной к нижней части головы. Голова 9 и кожух – из папье-маше (обрезки хлопчатобумажной ткани, пропитанные казеиновым клеем).
Электромеханическая часть игрушки сложна в изготовлении. Но трудности её изготовления компенсируются радостью, которую вы получите от общения с этой весёлой игрушкой.
Человекоподобные роботы
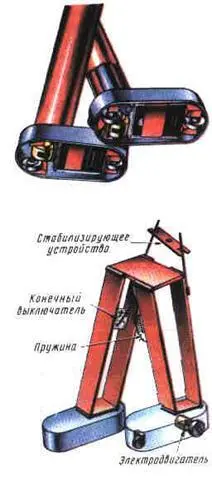
Модель простейшего человекоподобного робота с программным управлением показана на рис. 84. Высота робота около 70 см, и, хотя вид у него внушительный, он сделан из тонкого картона, покрыт металлизированной бумагой и окрашен серебристо – голубой краской. В ступнях робота размещены батареи и электродвигатели, перемещающие робота на обрезиненных колёсах. Как сконструировать ноги робота, чтобы он шагал, поясняет рис. 85.
При конструировании больших роботов трудно сделать модель устойчивой. Поясним отдельные конструктивные решения в таком роботе на примере модели, сделанной юными техниками из г. Щёлково.
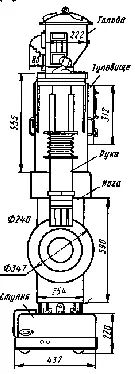
На рис. 86 дан чертёж этого робота в профиль и указаны основные размеры конструкции. Ступни робота сделаны очень большими, чтобы увеличить устойчивость модели. Ноги робота с верхней горизонтальной платформой свободно отделяются от туловища. В массивных ступнях модели находятся батареи аккумуляторов и механизмы, приводящие в движение задние колеса каждой ступни. Всего в каждой ступне смонтировано по три металлических колеса с жёсткими резиновыми обоймами. В средней части ноги проходят металлические тяги, благодаря которым достигается устойчивость модели во время движения. Свободное пространство в ногах заполнено различными блоками электронного оборудования модели, доступ к которым возможен через люки под коленными дисками робота. Туловище робота устанавливают на горизонтальную платформу и крепят замками. На платформе смонтированы реле и электромеханические автоматы, управляющие электродвигателями движения ног. При ходьбе ноги робота шагают, не отрываясь от пола (катятся). Такая конструкция ног позволяет роботу не только устойчиво ходить, но даже «плясать» под музыку.

Как работает механизм подъёма рук робота, поясняет рис. 87. На рис. 88 показана конструкция локтевого сустава модели. Когда робот берет в руку предметы, он прижимает их большим пальцем руки, поворачивающимся с помощью электромагнита (рис. 89)
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Занимательная анатомия роботов»
Представляем Вашему вниманию похожие книги на «Занимательная анатомия роботов» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.

![Айзек Азимов - Робот, который видел сны [Сны роботов]](/books/340771/ajzek-azimov-robot-kotoryj-videl-sny-sny-robotov-thumb.webp)




Обсуждение, отзывы о книге «Занимательная анатомия роботов» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.