Вадим Мацкевич - Занимательная анатомия роботов
Здесь есть возможность читать онлайн «Вадим Мацкевич - Занимательная анатомия роботов» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 1998, ISBN: 1998, Издательство: Радио и связь, Жанр: Технические науки, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Занимательная анатомия роботов
- Автор:
- Издательство:Радио и связь
- Жанр:
- Год:1998
- Город:Москва
- ISBN:5-256-00037-3
- Рейтинг книги:5 / 5. Голосов: 2
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Занимательная анатомия роботов: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Занимательная анатомия роботов»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Занимательная анатомия роботов — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Занимательная анатомия роботов», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Такое устройство можно взять за основу системы звукового управления роботом или его ЭВМ. Система звукового управления роботом должна включать в себя небольшой переносный электронный генератор звуковых команд и установленное в модели робота приёмное устройство.
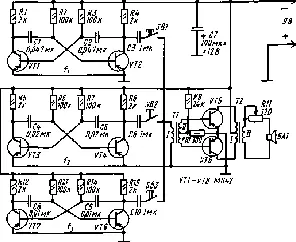
На рис. 41 показана схема генератора звуковых команд.
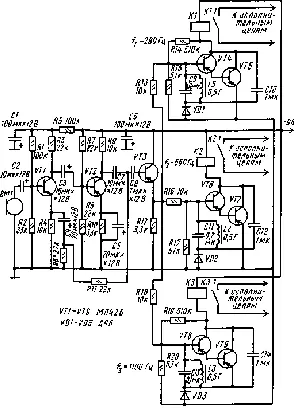
Генератор звуковых команд состоит из трёх мультивибраторов, генерирующих частоты 280, 560 и 1100 Гц, двухтактного усилителя сигналов мультивибраторов и динамической головки. Выходы мультивибраторов подключают к усилителю сигналов через контакты трёх кнопок. На рис. 42 представлена схема приёмного устройства звуковых команд. Оно состоит из входного микрофонного усилителя и трёх избирательных электронных реле, настроенных на соответствующие частоты мультивибраторов генератора.
Вот фактически и весь канал телеуправления – от генераторов звуковых команд до выходных реле приёмного устройства. К ним подключают дешифратор – электромагнитный шаговый искатель. Посмотрим, как он используется для операции сложения. Допустим, на командную кнопку SB1 (см. рис. 41) нажали три раза – движок искателя переместился на три шага. Если вслед за этим набрать цифру 7, то движок переместится на десятый контакт, если 8 – то на одиннадцатый, и т. д. Подавая через контакты шагового искателя напряжение, включающее светящиеся цифры от 1 до 10 или 20, мы «научим» модель робота, например, решать простейшие задачи на сложение.
Задачу на вычитание робот может решить, только если шаговый искатель имеет обратный ход. На частоте 280 Гц набирают уменьшаемое число, а на частоте 560 Гц – вычитаемое. Движок искателя укажет разность. Приводя в действие третий мультивибратор, искатель переводят в исходное положение.
Если выходные контакты искателя связать с исполнительными механизмами робота, то с помощью звукового генератора можно управлять не только его «математическими способностями», но и всем механизмом. При необходимости схему можно упростить, оставив в генераторе только один мультивибратор из трёх, а частоты получить коммутацией конденсаторов и резисторов. В зависимости от расстояния между передатчиком и приёмником мощность динамической головки может быть выбрана в пределах 0,1…0,5 Вт.
Настраивать резонансные контуры приёмника на выбранные значения частоты командных мультивибраторов лучше всего с помощью звукового генератора и осциллографа. Но в крайнем случае можно обойтись миллиамперметром на ток полного отклонения стрелки 30…50мА, включённым в цепь выходного реле канала. Настройку ведут по максимуму показаний прибора, когда на вход приёмника подают сигналы с мультивибраторов.
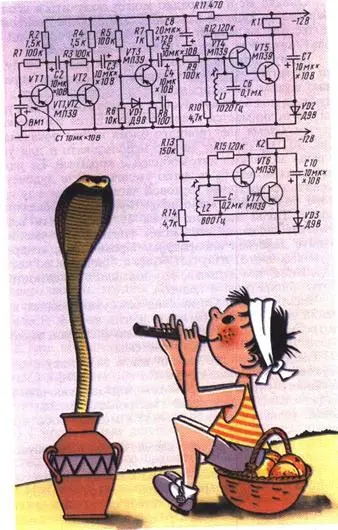
Слуховое устройство «Кобра, танцующая под музыку» по схеме аналогично приёмному устройству робота (см. рис. 42).
Чудеса активных RC – фильтров. Электрические фильтры являются одними из основных элементов различных радиоэлектронных систем. Это обусловлено тем, что во многих областях науки и техники (радиотехника, акустика, различные отрасли машиностроения, медицина, системы телеметрии и телеуправления) необходимы выделение, подавление, фильтрация сигналов.
До сих пор мы говорили о системах LC – фильтров, в которых резонансные свойства определяются значениями индуктивности L и ёмкости С. Но LC – фильтры, особенно в диапазоне звуковых частот, очень громоздки, и в современных конструкциях их заменяют активными RC – фильтрами.
Активные RC – филътры пригодны для использования в самых различных устройствах. Например, они хорошо работают на весьма низкой (около 1 Гц) частоте среза и имеют добротность выше 100. Активные фильтры можно успешно применять в устройствах, которые сочетают функции модуляции, выпрямления и фильтрации, и в других, где нельзя использовать катушки индуктивности. Слуховые системы с активными RC – фильтрами используют для обнаружения шума на очень большом расстоянии. Их широко применяют при исследовании биотоков мозга и снятии энцефалограмм. С их помощью решают задачи распознавания речевых сигналов в моделях органов слуха и т.п.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Занимательная анатомия роботов»
Представляем Вашему вниманию похожие книги на «Занимательная анатомия роботов» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.

![Айзек Азимов - Робот, который видел сны [Сны роботов]](/books/340771/ajzek-azimov-robot-kotoryj-videl-sny-sny-robotov-thumb.webp)




Обсуждение, отзывы о книге «Занимательная анатомия роботов» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.