Вадим Мацкевич - Занимательная анатомия роботов
Здесь есть возможность читать онлайн «Вадим Мацкевич - Занимательная анатомия роботов» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 1998, ISBN: 1998, Издательство: Радио и связь, Жанр: Технические науки, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Занимательная анатомия роботов
- Автор:
- Издательство:Радио и связь
- Жанр:
- Год:1998
- Город:Москва
- ISBN:5-256-00037-3
- Рейтинг книги:5 / 5. Голосов: 2
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Занимательная анатомия роботов: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Занимательная анатомия роботов»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Занимательная анатомия роботов — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Занимательная анатомия роботов», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
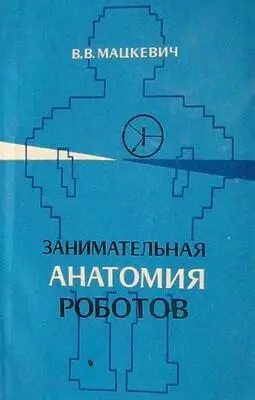
Такой гудок может выполнять функции сторожевого устройства. Для этого надо отключить модуль D2, а освободившийся вход модуля D4 через пару замкнутых сторожевых контактов или тонкую сторожевую проволоку соединить с плюсовым выводом батареи GB1. При размыкании контактов или при обрыве проволоки раздастся прерывистый – тревожный сигнал. По схеме рис. 17 можно собрать гудок, тон которого будет периодически меняться.
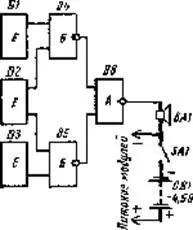
В тех случаях, когда необходимо ограничить время звучания гудка, устройство можно построить по схеме рис. 18. При нажатии на кнопку SB1 подаётся запускающий перепад напряжения на вход ждущего мультивибратора D1. На его входе появляется высокий логический уровень напряжения, и начинает работать управляемый мультивибратор D2. Его сигнал через логический элемент D3 поступает на динамическую головку ВА1.
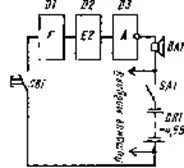
Примером устройства, использующего одновременно и звуковую, и световую сигнализацию, может служить контрольное устройство для дежурного робота (рис. 19). Рассмотрим работу этого устройства. Задающий мультивибратор D1 периодически переключает триггер D2 в состояние, при котором на его выходе присутствует высокий уровень напряжения. Этот уровень приложен к входу логического элемента D8, нагруженного сигнальной лампой HL1. Выходной сигнал мультивибратора D6 прерывает свечение лампы, делая световой сигнал более заметным.
С выхода триггера D2 сигнал поступает также на элемент совпадения D3. Сигнал с выхода инвертора D4 включает управляемый генератор D5. Выходной сигнал этого генератора через элемент D7 подан на динамическую головку ВА1. Поскольку на второй вход элемента D7 подан также сигнал с мультивибратора, звуковой сигнал будет прерывистым.
Моделирование радиоэлектронных робототехнических устройств на микросхемах. Самыми совершенными радиоэлектронными модулями являются интегральные микросхемы, содержащие в небольшом объёме очень большое число радиодеталей. На рис. 20 показан кристалл микросхемы рядом с муравьём. Не правда ли, впечатляющее сравнение?
Если вы хорошо усвоили все предыдущее, то сумеете работать и с микросхемами. Здесь придётся пользоваться специальным паяльником с очень тонким жалом, пинцетом и другими миниатюрными инструментами. С микросхемами надо обращаться очень аккуратно и грамотно.
Устройства, собранные на микросхемах, как правило, не требуют налаживания и конструктивно выглядят весьма простыми. Большой популярностью пользуются микросхемы серии К155, выполненные на основе транзисторно – транзисторной логики (ТТЛ). В этой серии есть многовходовые элементы И – НЕ, триггеры, счётчики, дешифраторы, запоминающие и другие устройства.
Чтобы помочь читателям освоить микросхемы и приступить к сознательному моделированию микроэлектронных робототехнических устройств, разработан и выпускается промышленностью «Конструктор для изучения микросхем и логических основ построения ЭВМ» (рис. 21). Он очень прост и может быть выполнен дома или в кружке робототехники. Этот конструктор позволяет на одной из самых распространённых микросхем К155 Л A3, состоящей из четырёх логических элементов 2И – НЕ, проделать десятки экспериментов.
Он состоит из упомянутой микросхемы и набора резисторов, конденсаторов, светодиодов, кнопок и гнёзд. Соединяя отдельные элементы конструктора проводниками, подключаемыми к гнёздам, можно собирать на микросхеме до 30 радиоэлектронных устройств.
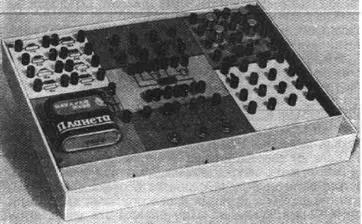
Кибернетический конструктор. Выпускаемый промышленностью кибернетический конструктор (рис. 22) позволяе! собирать из микросхем серии К155 основные узлы ЭВМ и различные занимательные радиоэлектронные устройства. С помощью конструктора можно ознакомиться с функциями половинного сумматора ЭВМ, дешифратора, регистра, накопителя, счётчика, элементов памяти ЭВМ и т д. Он позволяет моделировать ряд устройств, различных робототехнических систем.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Занимательная анатомия роботов»
Представляем Вашему вниманию похожие книги на «Занимательная анатомия роботов» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.

![Айзек Азимов - Робот, который видел сны [Сны роботов]](/books/340771/ajzek-azimov-robot-kotoryj-videl-sny-sny-robotov-thumb.webp)




Обсуждение, отзывы о книге «Занимательная анатомия роботов» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.