Вадим Мацкевич - Занимательная анатомия роботов
Здесь есть возможность читать онлайн «Вадим Мацкевич - Занимательная анатомия роботов» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 1998, ISBN: 1998, Издательство: Радио и связь, Жанр: Технические науки, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Занимательная анатомия роботов
- Автор:
- Издательство:Радио и связь
- Жанр:
- Год:1998
- Город:Москва
- ISBN:5-256-00037-3
- Рейтинг книги:5 / 5. Голосов: 2
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Занимательная анатомия роботов: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Занимательная анатомия роботов»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Занимательная анатомия роботов — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Занимательная анатомия роботов», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
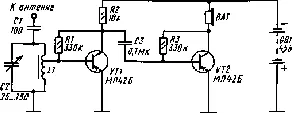
Соедините с общим проводом небольшую пластину из латуни, на неё положите клочок бумажной салфетки, смоченный уксусом. Поверх салфетки поместите небольшую пластину из алюминиевой фольги от конфеты. Получился химический источник тока G1, в котором латунь служит положительным полюсом, а фольга – отрицательным. Разумеется, напряжение и ток этого элемента настолько малы, что никакая лампа от него не загорится. Но он способен управлять транзистором – усилителем постоянного тока. Наш элемент обеспечит базовый ток, а транзистор коллекторным током зажжёт лампу, которая будет получать питание от источника коллекторного тока GB1.
Вот как это произойдёт. Нажмите на кнопку SB1 и выводом базы транзистора дотроньтесь до фольги – отрицательного полюса элемента G1 – лампа зажжётся. Таким образом, с помощью транзистора даже слабому элементу удалось зажечь лампу.
И в заключение – простейший радиоприёмник. Для сборки радиоприёмника (рис. 13) понадобится колебательный контур – конденсатор С2 и катушка L1. Каркас катушки склеивают из бумаги на отрезке круглого стержня длиной 40…45 мм и диаметром 8 мм из феррита 400НН или 600НН. Чтобы приёмник мог принимать радиостанции средневолнового диапазона, намотайте на каркас 80 витков эмалированного провода диаметром 0,15…0,18 мм.
Моделирование робото-технических радиоэлектронных устройств из модулей
Типовые модули являются основой всех промышленных радиоэлектронных разработок. В этом отношении наиболее убедителен пример конструирования современных ЭВМ. Первые ламповые ЭВМ состояли из множества типовых модулей. Транзисторные ЭВМ или, как их называют, ЭВМ второго поколения (серия «Минск» и др.) также собраны из транзисторных модулей. Для удобства конструирования ЭВМ второго поколения было разработано несколько серий типовых радиоэлектронных модулей.
Вывод: нужно осваивать модульное конструирование! Это современно, экономично и удобно.
Модульный конструктор. Радиокубики помогли нам понять назначение и свойства различных радиодеталей и транзисторов. Из кубиков можно собирать отдельные простые действующие устройства: мультивибраторы, ждущие мультивибраторы, триггеры и т.п. Но это только кирпичики более сложных радиоэлектронных устройств различного назначения.
Так же как многоэтажный современный дом собирают из отдельных простых элементов, так и самые сложные электронные аппараты, и робототехнические устройства в том числе, собирают из отдельных модулей – мультивибраторов, триггеров и т. п. Именно из таких модулей создавали ЭВМ, а мы из них будем собирать различные занимательные конструкции. Модули помогут нам моделировать робототехнические системы речи, слуха, зрения.
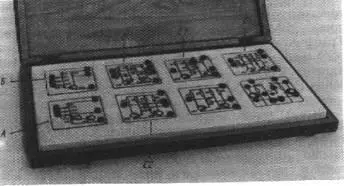
Промышленность выпускает модульный конструктор (рис. 14), состоящий из нескольких модулей. В первую очередь нам потребуются: модуль А – логический элемент ЗИ – НЕ с открытым выходом; модуль Б – маломощный логический элемент ЗИ – НЕ; модуль В – триггер, составленный из двух элементов И – НЕ; модуль Г – ждущий мультивибратор; модуль Е1 – мультивибратор; модуль Е2 – управляемый мультивибратор.
Используя модульные блоки, можно собирать модели различных устройств со звуковым выходным сигналом, которые можно будет использовать в различных робототехнических устройствах.
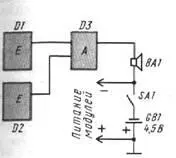
Одно из простейших устройств такого рода – генератор звуковой частоты (рис. 15). Из схемы видно, что на входы модуля D3 поданы сигналы с двух мультивибраторов D1 и D2. Один из них, D1, вырабатывает сигнал с частотой около 2000 Гц, второй, работающий с частотой около одного герца, периодически прерывает звуковой сигнал.
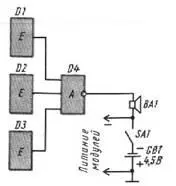
Если дополнить этот генератор ещё одним мультивибратором (рис. 16), то можно получить сигнальное устройство, звуковые импульсы которого будут прерывистыми. Модули этого устройства такие же, как и в предыдущем, только у мультивибратора D3 конденсаторы Cl, C2 имеют ёмкость по 2 мкФ.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Занимательная анатомия роботов»
Представляем Вашему вниманию похожие книги на «Занимательная анатомия роботов» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.

![Айзек Азимов - Робот, который видел сны [Сны роботов]](/books/340771/ajzek-azimov-robot-kotoryj-videl-sny-sny-robotov-thumb.webp)




Обсуждение, отзывы о книге «Занимательная анатомия роботов» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.