Авиция и космонавтика 2005 09
Здесь есть возможность читать онлайн «Авиция и космонавтика 2005 09» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: sci_transport, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Авиция и космонавтика 2005 09
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Авиция и космонавтика 2005 09: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Авиция и космонавтика 2005 09»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Авиция и космонавтика 2005 09 — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Авиция и космонавтика 2005 09», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Задачу осложняло также то, что большинство потенциальных целей лежало за океаном, и маршруты к районам пуска пролегали над морскими просторами в отсутствие характерных ориентиров, затрудняя навигационные задачи, когда полагаться приходилось на штурманский расчет, удаленные радиомаяки и астронавигацию.
Решением стало использование комбинированной системы наведения самолета-снаряда с помощью бортового программируемого автопилота и радиометрической аппаратуры носителя. Самолет оборудовался двухка-нальной РЛС. Аппаратура, работавшая в 10-см диапазоне, использовалась для решения навигационных задач и об-

наружения цели - самого объекта или, если тот не обладал должной радиоконтрастностью, характерных радиолокационных ориентиров, позволявших установить его положение; после этого РЛС переводилась на автосопровождение цели, определяя азимут и текущую дальность до нее, служившие данными для целеуказания и наведения ракеты.
Однако устойчивое обнаружение целей выполнялось в пределах радиогоризонта, на удалении 350-450 км. Чтобы достичь заданной дальности в 600 км, пуск ракеты предполагалось выполнять с этого рубежа еще до захвата цели РЛС носителя, с управлением на этом этапе в автопилотном режиме с последующим переходом на радиокомандное наведение по методу «оставшейся дальности». Ракета при этом направлялась в расчетную точку положения цели. Автопилот выдерживал заданное направление, высоту и стабилизировал ракету по крену, однако не учитывал снос, а с течением времени в его контурах накапливались погрешности (особенно по курсу), и эти ошибки управления требовалось компенсировать внешними командами. Установление радиолокационного контакта с целью позволяло уточнить ее положение и осуществить коррекцию наведения. Контроль выполнялся оператором с помощью пары экранов с горизонтальной разверткой, "зубцы" на которых указывали нахождение ракеты и цели, а манипулирование ручками трансформировалось в управляющие команды. Для их передачи служил канал, сопровождавший наведение ракеты дискретными управляющими импульсами. Ответчик дальности и радиоаппаратура, установленные на ракете, формировали ответные сигналы в дру-
гом диапазоне во избежание взаимных помех. Автоматически определялся курсовой угол между направлениями на снаряд и цель и посылался управляющий импульс на изменение траектории ракеты.
Приемный канал производил дешифровку сигнала и передачу на автопилот, управляющий рулями. Этап командного наведения, с учетом высокой скорости ракеты, был непродолжительным и носил характер коррекции, после чего восстанавливалось независимое автономное управление.
С выходом ракеты на удаление 50 км от цели, где наведение могло быть сорвано в сложной помеховой обстановке и носитель подвергался риску досягаемости зенитных средств (к этому моменту он находился в 270 - 300 км от цели), командное наведение прекращалось и остаток пути ракета проходила, подчиняясь программе автопилота. Вероятные погрешности наведения были удовлетворительными для поражения площадных объектов и восполнялись колоссальной поражающей мощью ядерного заряда, мегатонны которого хватало для выполнения задачи и при километровых промахах.
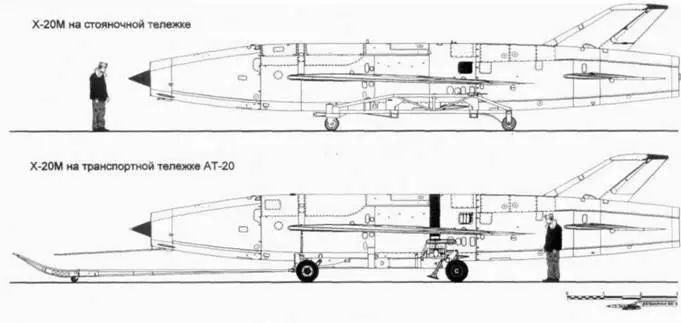
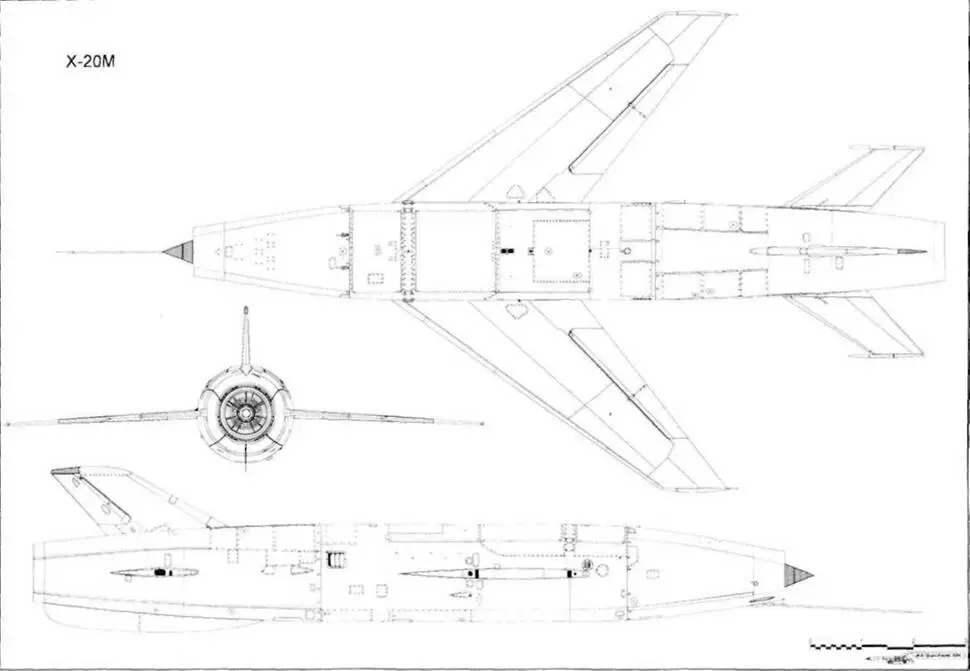
Эскизный проект Ту-95К был подготовлен в течение полугода и подписан А.Н.Туполевым 26 октября 1954 года. Осенью 1955 года после согласования военные приняли макет ракетоносца. Самолет получил существенные изменения по сравнению с исходным бомбардировщиком: в носовой части разместили двухантенную РЛС с отдельными обтекателями аппаратуры, рабочее место штурмана переместилось за кабину летчиков; грузоотсек для размещения пятнадцатиметровой ракеты удлинили почти вдвое, оборудовав балочным держателем БД-206, на котором в полуутопленном положении подвешивалась Х-20. Для снижения сопротивления в полете по маршруту, держатель с ракетой находился в убранном положении, а воздухозаборник Х-20 прикрывался полукруглым обтекателем. Перед пуском обтекатель поворачивался, убираясь в фюзеляж, держатель опускался на 950 мм, запускался двигатель ракеты, и производилась отцепка. В полете без ракеты грузоотсек закрывался створками.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Авиция и космонавтика 2005 09»
Представляем Вашему вниманию похожие книги на «Авиция и космонавтика 2005 09» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.






Обсуждение, отзывы о книге «Авиция и космонавтика 2005 09» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.