ВЕРТОЛЁТ 2000 01
Здесь есть возможность читать онлайн «ВЕРТОЛЁТ 2000 01» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Год выпуска: 2000, Жанр: sci_transport, periodic, military_weapon, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:ВЕРТОЛЁТ 2000 01
- Автор:
- Жанр:
- Год:2000
- ISBN:нет данных
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
ВЕРТОЛЁТ 2000 01: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «ВЕРТОЛЁТ 2000 01»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
ВЕРТОЛЁТ 2000 01 — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «ВЕРТОЛЁТ 2000 01», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
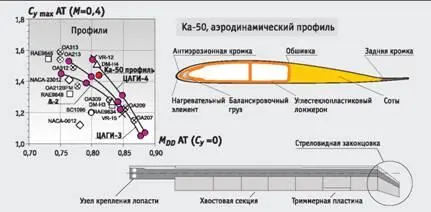
Рис. 6. Аэродинамический профиль лопасти
В конце 50-х годов на фирме «Камов» были разработаны, изготовлены и испытаны стеклопластиковые лопасти несущего винта. В 1965 г. первые серийные стеклопластиковые лопасти были успешно испытаны на вертолете Ka-15, в 67-м – на Ka-26. В конце 70-х фирма «Камов» разработала стеклоуглепластиковые лопасти винта.
Углеволокно имело модуль упругости в шесть раз больший, чем у всех используемых в то время конструкционных материалов. Это позволило использовать новый материал для решения проблем прочности, устойчивости и аэроупругости конструкции. Использование передовых технологий в работе с материалами определило и геометрию несущего винта вертолета Ka-50. Его лопасти имеют специальный аэродинамический профиль, оптимальную крутку и стреловидную законцовку (рис. 6). Кроме того, все лопасти фирмы «Камов» оснащены электрической противообледенительной системой.
Движение лопасти «взмах-вращение- шаг» и устойчивость движения лопастей винта определяют параметры проводки управления.
Математическая модель проводки, разработанная фирмой «Камов», используется для проектирования проводки управления и для анализа частот и устойчивости. В модели используется матрица податливости проводки управления, которая была отработана с использованием результатов испытаний натурных соосных вертолетов различных типов (четырех). Данная математическая модель проводки управления и адекватные формулы для «аппроксимации-вычисления» матрично-функциональных элементов были разработаны по результатам экспериментов. Использование формул позволяет без непосредственного физического измерения определить характеристики жесткости агрегатов проводки управления соосных вертолетов рассмотренных типов. Собственные векторы матрицы податливости определяют крутильные формы колебаний всех шести лопастей с учетом конструктивных особенностей проводки управления. Собственные числа матрицы определяют динамическую податливость, которая обычно измеряется в частотных натурных испытаниях.
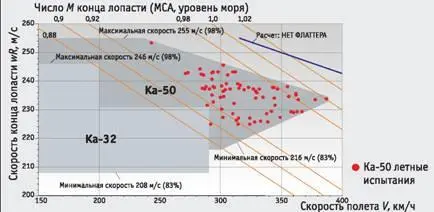
Рис. 7. Диапазон скоростей винтов
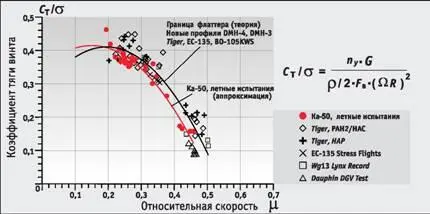
Рис. 8. Граница срывного флаттера
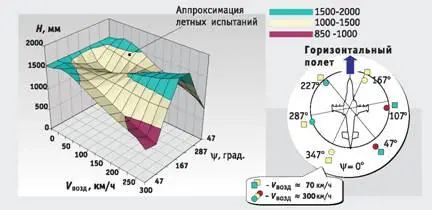
Рис. 9. Расстояние между концами лопастей верхнего и нижнего винтов в зависимости от скорости полета и азимута лопасти
Приемлемый запас по скорости полета до границы флаттера и срывного флаттера был определен способом математического моделирования и подтвержден данными летных испытаний (рис.7, координаты wR-V). На рисунке представлена только часть результатов летных испытаний, а именно, от V=300 до Vmax =350 км/ч и далее до V=390 км/ч. В расчетах флаттер не обнаружен, что подтверждается летными испытаниями (рис. 8). Расчетная граница флаттера показывает, что сравнительно с данными (точками) летных испытаний имеется запас по скорости не менее 50 км/ч (рис.7).
Суммарная переменная сила, приложенная на втулках верхнего и нижнего несущих винтов, возбуждает вибрации корпуса вертолета. Конструкция соосных винтов Ka-50 обеспечивает минимальные переменные суммарные силы на корпусе вертолета, что определяет и низкий уровень вибрации соосных летательных аппаратов, который не превосходит 0,01g на основных режимах полета. При этом маятники на лопастях и антирезонансная подвеска редуктора не устанавливаются.
Специфической для соосного вертолета является задача обеспечения приемлемого расстояния между концами лопастей верхнего и нижнего винтов. Как задача аэромеханики, она аналогична задаче обеспечения зазора между лопастями несущего винта и хвостовой балкой вертолета классической схемы.
На фирме «Камов» использовались как расчетные методы исследования этой проблемы, так и летные исследования. В летных испытаниях с помощью фотооптических приборов расстояние измеряется в каждой из 6 «точек встречи», в которых лопасти верхнего винта оказываются над лопастями нижнего винта при их относительном вращении с удвоенной угловой скоростью.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «ВЕРТОЛЁТ 2000 01»
Представляем Вашему вниманию похожие книги на «ВЕРТОЛЁТ 2000 01» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.

Обсуждение, отзывы о книге «ВЕРТОЛЁТ 2000 01» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.