ВЕРТОЛЁТ 2000 01
Здесь есть возможность читать онлайн «ВЕРТОЛЁТ 2000 01» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Год выпуска: 2000, Жанр: sci_transport, periodic, military_weapon, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:ВЕРТОЛЁТ 2000 01
- Автор:
- Жанр:
- Год:2000
- ISBN:нет данных
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
ВЕРТОЛЁТ 2000 01: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «ВЕРТОЛЁТ 2000 01»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
ВЕРТОЛЁТ 2000 01 — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «ВЕРТОЛЁТ 2000 01», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
На рис.9 показана механика явления сближения концов лопастей. На режиме висения плоскости концов лопастей верхнего и нижнего винтов параллельны. Расстояние между ними несколько больше конструктивного расстояния между втулками винтов (H 0).
В поступательном полете возникают переменные по азимуту воздушные силы, которые вызывают маховое движение лопастей. Вследствие этого в продольном направлении плоскости концов лопастей верхнего и нижнего винтов наклоняются на равные углы, оставаясь параллельными, в направлении скорости полета (вперед или назад). В поперечном направлении плоскости концов лопастей наклоняются навстречу друг другу вследствие противоположного направления вращения лопастей верхнего и нижнего винтов (рис.9).
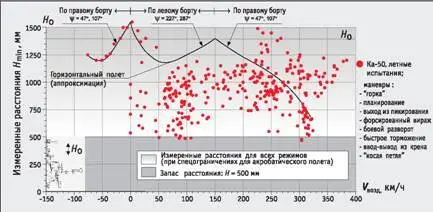
Рис.10. Измеренные расстояния между концами лопастей верхнего и нижнего винтов
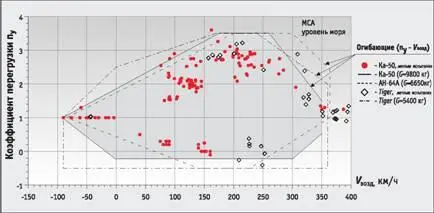
Рис. 11. Зависимость коэффициента перегрузки от скорости полета
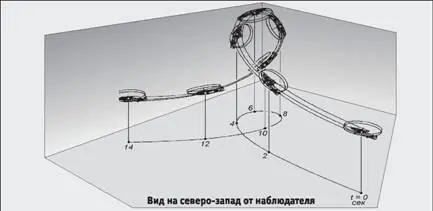
Рис. 12. Траектория полета при косой петле (правой)
Поэтому на одной стороне диска расстояние между плоскостями концов лопастей уменьшается, а на противоположной – увеличивается. В поперечном направлении угол наклона плоскости концов лопастей примерно равен углу взмаха лопасти (влево/вправо) и зависит от режима полета (рис.9). Как известно из аэромеханики, существуют зависимости между маховым движением лопасти и параметрами винта, особенно числом Локка, углом геометрической крутки лопасти и крутильной жесткостью лопасти и жесткостью проводки управления.
Расчеты и результаты летных испытаний определили значения параметров соосных винтов, упомянутые выше, которые гарантируют приемлемое безопасное расстояние между концами лопастей.
На рис.9 показаны измеренные в ходе летных испытаний вертолета Ка-50 углы махового движения концов лопастей в сравнении с расчетными данными.
Обобщенные результаты измерений для горизонтального полета и маневров вертолета Ка-50 представлены на рис.10, 11.
Приемлемые расстояния между концами лопастей соосного винта были определены методом математического моделирования, подтверждены результатами летных испытаний для всего утвержденного перечня маневров и успешно обеспечиваются в ходе эксплуатации вертолета.
Зависимость «перегрузка/скорость полета» для вертолета Ka-50 была рассчитана и подтверждена результатами летных испытаний как в пределах эксплуатационных ограничений (тангаж, крен, частота вращения винта, нагрузки на лопастях), так и в пределах специальных ограничений акробатического пилотажа.
Точками на рис.11 представлена часть результатов летных испытаний, а именно: для 2f<3,5 и для n y»0.
Каждая точка отражает результат одного из выполненных маневров. Большая часть точек показана на рис.8. Как видно, превышения установленных ограничений в ходе испытаний не были обнаружены.
На рис.8 все данные представлены в сравнении с данными летных испытаний вертолета Tiger.
На рис. 11 показана зависимость коэффициента перегрузки от скорости полета после «косой петли» (n y ~ 3,5).
Программное обеспечение NSTAR, совместимое с аппаратурой летных испытаний и со штатными бортовыми магнитными регистраторами, было создано для обработки и анализа данных о полете вертолета Ka-50. При использовании записей, сделанных испытательной контрольно-измерительной аппаратурой вертолета, программное обеспечение NSTAR позволяет восстановить траекторию маневра и вычислить дополнительные значения параметров полета. Так, на рис.12 показан пример восстановления траектории «косой петли».
Результаты, полученные при работе системы NSTAR, могут быть использованы в процессе обучения пилотов (анализ действий и оказание помощи), для контроля ограничений критических параметров и в качестве входных данных для математического моделирования.
Сегодня можно с уверенностью сказать, что продукция фирмы «Камов» является действительно уникальной. Во- первых, фирма продолжает оставаться единственной в мире, конструирующей летательные аппараты соосной схемы. Во-вторых, современные летательные аппараты типа Ка-50 создаются с использованием новейших передовых технологических и конструктивных решений.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «ВЕРТОЛЁТ 2000 01»
Представляем Вашему вниманию похожие книги на «ВЕРТОЛЁТ 2000 01» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.

Обсуждение, отзывы о книге «ВЕРТОЛЁТ 2000 01» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.