Вертолет 2002 03
Здесь есть возможность читать онлайн «Вертолет 2002 03» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Год выпуска: 2002, Жанр: sci_transport, periodic, military_weapon, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Вертолет 2002 03
- Автор:
- Жанр:
- Год:2002
- ISBN:нет данных
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Вертолет 2002 03: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Вертолет 2002 03»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Вертолет 2002 03 — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Вертолет 2002 03», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Если учесть, что вертолет на внешней подвеске транспортирует груз 5000 кг, и связать эту величину с прямыми эксплуатационными затратами через коэффициент

то увидим, что Ка-32А11ВС имеет самый
низкий коэффициент η(без учета показателей опытного вертолета S-92). Величина данного коэффициента для различных типов вертолетов представлена в табл. 5.
Исходя из вышеизложенного можно сделать следующие выводы:
– вертолет Ка-32А11ВС, имеющий российский и ряд иностранных сертификатов типа и обладающий отличными летно-техническими характеристиками, вполне конкурентоспособен на мировом авиационном рынке;
– необходимо настойчиво вести работы по дальнейшему повышению ресурса агрегатов и снижению эксплуатационных затрат на обслуживание вертолета;
– для повышения конкурентоспособности необходимо в ближайшее время на базе вертолета Ка-32А11ВС создать его новые модификации с повышенной грузоподъемностью и комфортабельной пассажирской кабиной, отвечающие последним требованиям АП-29, FAR-29.
Сделать все это фирме КАМОВ, безусловно, по силам, так как ее специалисты сегодня обладают уникальным опытом не только создания вертолетов гражданского назначения, но и сертификации их в России и за рубежом, в том числе в высокоразвитых странах, а также обеспечения их поставок и обслуживания на уровне мировых стандартов.
Борис СОКОЛОВ, заместитель главного конструктора
Мы учили летать Ка-25
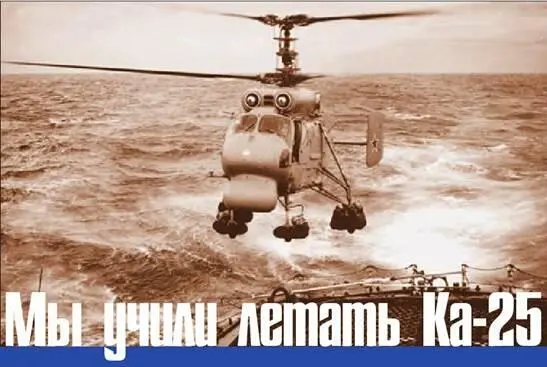
Боевой корабельный Ка-25ПЛ
По заданию ВМФ был построен и в 1961 году впервые поднялся в воздух боевой корабельный вертолет Ка-25ПЛ, предназначенный для поиска и уничтожения атомных лодводных лодок. Впервые в нашей стране был создан не просто винтокрылый аппарат, а боевой вертолетный комплекс, органично вошедший в систему «корабль-вертолет». Нам же, испытателям ЛИК ОКБ Камова (летчикам, инженерам и механикам), предстояло научить Ка-25 успешно выполнять задания с кораблей в сложных океанских условиях, на всех широтах.
Прежде всего нужно было заставить автоматику сколь угодно долго удерживать вертолет на режиме висения строго над одной точкой морской поверхности. Сигналы для этого он получал по отклонению кабель-троса (заглубленной акустической станции) от своего вертикального положения. По молодости и неопытности я не верил, что автоматика может справиться с этой задачей. Дело в том, что ручной режим висения любого вертолета является самым сложным и трудоемким, и чтобы висеть точно над заданной точкой, необходимо замечать тенденции изменения крена и тангажа. Нужно как бы предвидеть их и своевременно парировать рычагами управления. Летчики с грубоватой техникой пилотирования называют это способом двойных движений ручкой управления, но у них вертолет никогда устойчиво не висит даже в штилевых условиях.
На выполнение этого задания со мной летал молодой ведущий инженер Роберт Тавадзе из исследовательского института им. Громова. Удовлетворительного автоматического висения не получалось. После каждого летного дня Роберт проводил какие-то расчеты электрических цепей, передаточных чисел, а утром на вертолете сам что-то паял, перепаивал – и снова в море. И вот, после полутора месяцев бесперспективных, как мне казалось, полетов вертолет завис, да так, что можно было по лестнице спуститься на катер, оставив на несколько часов вертолет без летчика. Без сомнения, это достижение стало основой, фундаментом для доведения всего комплекса до рабочего состояния.
После завершения других доводочных работ начались испытания комплекса по поиску и уничтожению (средствами поражения без боевых зарядов) реальных целей (подводных лодок). Проверялось различное противолодочное оружие, в том числе торпеды, управляемые по проводам, но относительно малого радиуса действия. Это обстоятельство требовало наибыстрейшего перелета вертолета в точку обнаружения подводной цели (иначе подлодка успевала уйти за пределы радиуса действия средства поражения). Передо мной была поставлена задача: добиться минимальной продолжительности такого перелета (включая время уборки акустического прибора, разгона машины, ее торможения против ветра, заглубления прибора в новой точке). Соосный вертолет позволяет начинать энергично увеличивать скорость полета при любом курсовом угле висения прямо в направлении азимута цели и точно так же энергично зависать, невзирая на направление и скорость ветра над морем. К тому же я начинал разгон сразу после выхода прибора из воды, убирал его уже в процессе разгона. Выпускал его также заблаговременно с таким расчетом, чтобы к моменту полного зависания он уже касался воды и динамично заглублялся. Достичь желаемого результата удалось благодаря уникальным возможностям, имеющимся только у соосных вертолетов.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Вертолет 2002 03»
Представляем Вашему вниманию похожие книги на «Вертолет 2002 03» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.


Обсуждение, отзывы о книге «Вертолет 2002 03» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.