Владимир Фетисов - Беспилотная авиация - терминология, классификация, современное состояние
Здесь есть возможность читать онлайн «Владимир Фетисов - Беспилотная авиация - терминология, классификация, современное состояние» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Уфа, Год выпуска: 2014, ISBN: 2014, Издательство: ФОТОН, Жанр: sci_transport, Справочники, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Беспилотная авиация: терминология, классификация, современное состояние
- Автор:
- Издательство:ФОТОН
- Жанр:
- Год:2014
- Город:Уфа
- ISBN:978-5-9903144-3-6
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Беспилотная авиация: терминология, классификация, современное состояние: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Беспилотная авиация: терминология, классификация, современное состояние»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Беспилотная авиация: терминология, классификация, современное состояние — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Беспилотная авиация: терминология, классификация, современное состояние», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Этот аппарат, разработанный еще в 1967 г., мог совершать как вертикальные взлеты/посадки, так и обычные (укороченные). Традиционный фюзеляж имел расположенные в задней части короткие крылья, на передней кромке каждого из которых размещались импеллеры. Управляющие поверхности элеронов находились в турбулентном потоке воздуха от трехлопастного винта диаметром 2,13 м. Силовая установка – четыре турбовальных газотурбинных двигателя, расположенных попарно на заднем крыле и работающих на общую трансмиссию.
Конвертопланы с поворотными импеллерами в пилотируемой авиации сейчас применяются редко (видимо, по экономическим причинам). В беспилотной же авиации у этой схемы, видимо, есть определенные перспективы. Пример – разрабатываемый в США с 2008 г. компанией American Dynamics проект беспилотного конвертоплана с поворотными импеллерами AD-150 (рис. 1.43) [41].
В конвертопланах с поворотным крылом поворачивается всё крыло вместе с установленными на нем двигателями и винтами. Достоинством такой схемы является то, что при вертикальном взлёте крылья не закрывают воздушный поток от винтов (увеличивая тем самым эффективность работы винтов). На рис. 1.44 приведены примеры конвертопланов типа Tiltwing.

Рис. 1.43. Беспилотный конвертоплан AD-150 компании American Dynamics с поворотными импеллерами (США, 2008)

а

б
Рис. 1.44. Конвертопланы с поворотным крылом – Tiltwing: а – экспериментальный конвертоплан Vertol VZ-2 (США, 1957); б – современный беспилотный четырехмоторный Tiltwing на вертикальном взлете – БПЛА компании GH Craft (Япония, 2008)
Беспилотные конвертопланы с четырьмя поворотными роторами, подобные тому, что показан на рис 1.42, а также конвертопланы с поворотным крылом, построенные по схеме, показанной на рис 1.44 б, часто рассматривают как особые подклассы мультикоптеров (точнее – квадрокоптеров) – соответственно QTR UAV (Quad Tilt Rotor UAV) и QTW UAV (Quad Tilt Wing UAV).
В конвертопланах со свободным крылом (Freewing) в зависимости от фазы полета отклоняются винты, создавая вертикальную или горизонтальную тягу, а крылья свободно вращаются вокруг оси, перпендикулярной фюзеляжу.
Под напором воздуха, создаваемого винтами, крылья принимают вертикальное, горизонтальное или какое-либо промежуточное положение. Аппараты такой конструкции отличаются стабильностью полета [42]. На рис. 1.45 показан пример беспилотника типа Freewing.

а

б
Рис. 1.45. Конвертоплан со свободным крылом – Freewing (БПЛА Spirit фирмы Flight Technologies, США): а – взлет/посадка, б – горизонтальный полет
Многовинтовые вертолеты (мулътикоптеры). К этой группе относятся вертолеты, имеющие больше двух несущих винтов. Реактивные моменты уравновешиваются за счет вращения несущих винтов попарно в разные стороны или наклона вектора тяги каждого винта в нужном направлении (рис. 1.46). Беспилотные мультикоптеры, как правило, относятся к классам мини- и микро-БПЛА [65].
Существует некоторая неопределенность относительно того, являются ли мультикоптерами аппараты с двумя симметричными несущими винтами – бикоптеры. В некоторых источниках их считают подклассом мультикоптеров. По мнению авторов этой книги, лучше относить такие аппараты к уже рассмотренным вертолетам с поперечной схемой расположения винтов. Безусловно к мультикоптерам относятся аппараты, имеющие три несущих винта и более. Соответственно трехроторные мультикоптеры называют трикоптерами, четырехроторные – квадрокоптерами, шестироторные – гексакоптерами, восьмироторные – октокоптерами.
QuadCopters:
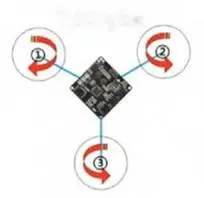
TriCopter
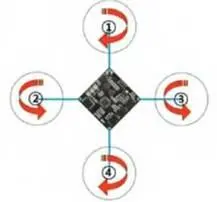
+Copter
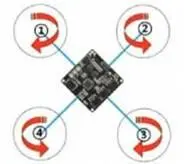
XCopter

Y4Copter

HexaCopter
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Беспилотная авиация: терминология, классификация, современное состояние»
Представляем Вашему вниманию похожие книги на «Беспилотная авиация: терминология, классификация, современное состояние» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.


Обсуждение, отзывы о книге «Беспилотная авиация: терминология, классификация, современное состояние» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.