Владимир Фетисов - Беспилотная авиация - терминология, классификация, современное состояние
Здесь есть возможность читать онлайн «Владимир Фетисов - Беспилотная авиация - терминология, классификация, современное состояние» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Уфа, Год выпуска: 2014, ISBN: 2014, Издательство: ФОТОН, Жанр: sci_transport, Справочники, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Беспилотная авиация: терминология, классификация, современное состояние
- Автор:
- Издательство:ФОТОН
- Жанр:
- Год:2014
- Город:Уфа
- ISBN:978-5-9903144-3-6
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Беспилотная авиация: терминология, классификация, современное состояние: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Беспилотная авиация: терминология, классификация, современное состояние»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Беспилотная авиация: терминология, классификация, современное состояние — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Беспилотная авиация: терминология, классификация, современное состояние», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
– управляемые заслонки на выходе импеллеров (рис. 1.30, а);
– повороты (на небольшой угол) вокруг своей оси балок с укрепленными на их концах роторами (рис. 1.30, б, в, г);
– небольшие отклонения балок с роторами в вертикальной плоскости относительно точек их крепления (рис. 1.30, г);
– изменение соотношения частот вращения винтов и др.
Очень часто в беспилотных вертолетах, построенных по двухвинтовой поперечной схеме, используют не открытые винты, а винты, защищенные кольцевым кожухом (англ.: ducted fan), или импеллеры (рис. 1.30, а, в). Это увеличивает эффективность винтов и делает более безопасными полеты в условиях возможных столкновений с препятствиями.
Легкие БПЛА, построенные по данной схеме, часто называют бикоптерами (англ.: bicopter, twincopter, dualcopter). Их можно классифицировать также как подкласс мультикоптеров (см. далее – табл. 1.3).
Двухвинтовая продольная схема (англ.: tandem rotor helicopter). У таких вертолетов реактивный момент компенсируется за счет противоположного направления вращения винтов, которые расположены один за другим вдоль фюзеляжа (рис. 1.31). Несущие винты располагаются с перекрытием, причем задний винт имеет превышение, чтобы уменьшить вредное влияние на него потока от переднего винта. Достоинство схемы – большой объем грузовой кабины. Недостатками являются сложная система трансмиссии, необходимость синхронизации вращения несущих винтов, большие индуктивные потери при горизонтальном полете и переменные нагрузки на несущих винтах, а также сложная посадка при авторотации.

Рис. 1.31. Пример беспилотного вертолета, построенного по двухвинтовой продольной схеме – DP-6 Whisper компании Dragonfly Pictures (США, 2007). Назначение: разведка, ретрансляция ТВ-сигнала. Длина 3,35 м. Диаметр ротора 3,2 м. Максимальная взлетная масса 215 кг, масса полезной нагрузки 34 кг. Скорость 185 км/ч. Продолжительность полета 5,5 ч. Двигатель: ДВС, 97 л.с.
Схема с перекрещивающимися несущими винтами (синхроптер) (англ.: intermeshing rotor helicopter). У таких вертолетов несущие винты расположены по бокам фюзеляжа, а их оси наклонены наружу (рис. 1.32). Из-за наклона винтов реактивные моменты уравновешиваются только относительно вертикальной оси, а их проекции относительно поперечной оси складываются, образуя момент тангажа, что необходимо учитывать при расчете продольной устойчивости. Достоинством схемы являются малые габариты вертолета, а недостатками – необходимость синхронизации вращения винтов, сложная система трансмиссии, большой уровень вибраций, возникновение продольного момента, усложняющего балансировку вертолета. Вертолет хорошо приспособлен для вертикального подъема грузов.

Рис. 1.32. Синхроптер К-МАХ фирмы Kaman Aerospace (США). Беспилотная версия разрабатывается совместно с фирмой Lockheed Martin. Способен перевозить грузы массой до 2,7 тонны на расстояние до 500 километров. Максимальная скорость до 185 км/ч. В 2011 г. использовался в Афганистане в беспилотном режиме для доставки боеприпасов.
Реактивный вертолет (англ.: tip jet helicopter). У таких вертолетов механический привод несущего винта заменен реактивным. Суммарный крутящий момент на втулке несущего винта близок к нулю, так как момент несущего винта от сил сопротивления воздуха уравновешивается моментом, создаваемым тягой реактивных двигателей или сопел, установленных на концах лопастей (рис. 1.33).
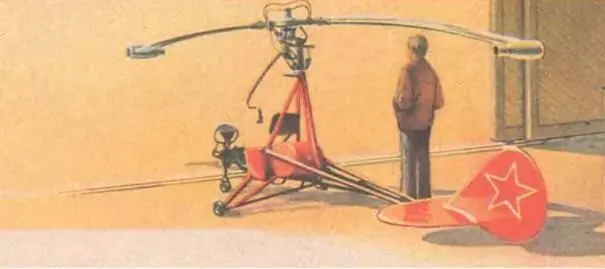
Рис. 1.33. Экспериментальный реактивный мини-вертолет с пульсирующими реактивными двигателями, установленными на концах лопастей (СССР, 1947 год)
При этом отпадает необходимость в мощном рулевом винте. Реактивный привод несущего винта может осуществляться, например, установкой на концах лопастей реактивных двигателей различного типа, топливо к которым подается через втулку и лопасти винта. Достоинствами вертолетов с реактивным приводом являются простая система трансмиссии и высокая весовая отдача. К недостаткам следует отнести сложную конструкцию втулки и лопасти несущего винта, трудность создания специальных двигателей, работающих в поле центробежных сил, большой расход топлива, а также шум от прямоточных и пульсирующих воздушно-реактивных двигателей.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Беспилотная авиация: терминология, классификация, современное состояние»
Представляем Вашему вниманию похожие книги на «Беспилотная авиация: терминология, классификация, современное состояние» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.


Обсуждение, отзывы о книге «Беспилотная авиация: терминология, классификация, современное состояние» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.