Владимир Фетисов - Беспилотная авиация - терминология, классификация, современное состояние
Здесь есть возможность читать онлайн «Владимир Фетисов - Беспилотная авиация - терминология, классификация, современное состояние» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Уфа, Год выпуска: 2014, ISBN: 2014, Издательство: ФОТОН, Жанр: sci_transport, Справочники, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Беспилотная авиация: терминология, классификация, современное состояние
- Автор:
- Издательство:ФОТОН
- Жанр:
- Год:2014
- Город:Уфа
- ISBN:978-5-9903144-3-6
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Беспилотная авиация: терминология, классификация, современное состояние: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Беспилотная авиация: терминология, классификация, современное состояние»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Беспилотная авиация: терминология, классификация, современное состояние — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Беспилотная авиация: терминология, классификация, современное состояние», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:

Рис. 1.56. Орнитоптер SmartBird компании Festo (Германия, 2011): а – создатели аппарата; б – вид сзади; в – демо-макет механических передач; г – различные фазы полета
БПЛА, имитирующие движения летающих насекомых, условно можно подразделить на имитаторы четырехкрылых и имитаторы двукрылых насекомых. Четырехкрылые (стрекозы, бабочки) совершают более сложные движения, чем двукрылые, и возможностей управления полетом у них гораздо больше. На рис. 1.57 показан пример четырехкрылого энтомоптера, разработанного компанией Festo.

Рис. 1.57. Эитомоитер Вionicopter компании Festo (Германия, 2013)
Длина корпуса аппарата составляет 44 см, размах крыльев 63 см. Крылья выполнены из углеродного волокна и полиэфирной плёнки. Показатель частоты взмахов крылом относительно невысокий – 15-20 Гц. Масса аппарата составляет всего 175 г.
Управление полётом робота осуществляется со смартфона. BionicOpter имеет встроенный ARM-микроконтроллер, обеспечивающий стабилизацию полёта. Аппарат оснащен одним основным электродвигателем и восемью сервоприводами. На борту имеется набор сенсоров для предотвращения столкновений с препятствиями. Схема питается от двухсекционного литийполимерного аккумулятора 7,4 В.
Конструкция BionicOpter обеспечивает этому аппарату множество возможностей маневрирования. Каждое крыло, кроме маховых движений, может совершать вращательные движения вокруг своей оси и угловые перемещения в горизонтальной плоскости. Кроме того, хвостовая часть может изгибаться, меняя положение центра тяжести. Благодаря таким возможностям управления, аппарат может, например, мгновенно зависать на месте и перемещаться в горизонтальной плоскости в любую сторону, не изменяя при этом угла тангажа.
Разработки БПЛА, имитирующие двукрылых насекомых, развиваются, в основном, в направлении микроминиатюризации аппаратов. Здесь все достижения, видимо, еще впереди. Развитие технологий новых сверхлегких материалов, источников питания, наноэлектроники и интеллектуального управления в ближайшие годы позволят создать микроминиатюрные насекомоподобные БПЛА, приближающиеся к живым существам и по выполняемым функциям, и по размеру. Появятся (уже появляются) новые концепции управления коллективами микророботов, перед которыми можно будет ставить цели, ранее не достижимые, т.к. эти формации воздушных микророботов будут обладать большими возможностями в силу таких их качеств, как коллективная живучесть, способность многовариантного решения задач, незаметность перемещений, способность к массированным и непрерывным миссиям и т.д.
Пример разработки миниатюрного двукрылого энтомоптера показан на рис. 1.58. Это микро-БПЛА Mobee (Monolithic Bee), разработанный Лабораторией микроробототехники Гарвардского университета (США). Его особенность в том, что он изготовлен по интегральной многослойной технологии. В основе – тонкая углепластиковая пластина, в которой лазером сделаны все необходимые вырезы, затем нанесено еще множество металлических и неметаллических слоев, формирующих необходимые электронные и микроэлектромеханические устройства, включая сенсоры, радиотехнические устройства и актуаторы крыльев [44].
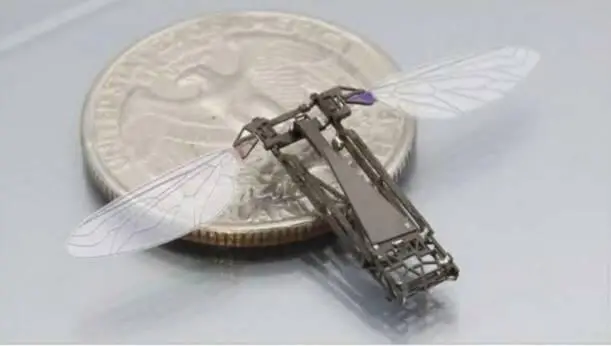
Рис. 1.58. Энтомоптер Mobee – разработка Harvard Microrobotics Lab (США, 2011)
1.2.2.5. БПЛА аэростатического типа
БПЛА аэростатического типа (blimps) – это особый класс БПЛА, в котором подъемная сила создается преимущественно за счет архимедовой силы, действующей на баллон, заполненный легким газом (как правило, гелием). Этот класс представлен, в основном, беспилотными дирижаблями.
Дирижабль (от фр. dirigeable – управляемый) – Л А легче воздуха, представляющий собой комбинацию аэростата с движителем (обычно это винт (пропеллер, импеллер) с электрическим двигателем или ДВС) и системы управления ориентацией.
По конструкции дирижабли подразделяются на три основных типа: мягкий, полужёсткий и жёсткий [45].
В дирижаблях мягкого и полужёсткого типа оболочка для несущего газа мягкая, которая приобретает требуемую форму только после закачки в неё несущего газа под определённым давлением. В дирижаблях мягкого типа неизменяемость внешней формы достигается избыточным давлением несущего газа, постоянно поддерживаемым баллонетами – мягкими ёмкостями, расположенными внутри оболочки, в которые нагнетается воздух (рис. 1.59). Баллонеты, кроме того, служат для регулирования подъемной силы и управления углом тангажа (дифференцированная откачка/закачка воздуха в баллонеты приводит к изменению центра тяжести аппарата).
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Беспилотная авиация: терминология, классификация, современное состояние»
Представляем Вашему вниманию похожие книги на «Беспилотная авиация: терминология, классификация, современное состояние» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.


Обсуждение, отзывы о книге «Беспилотная авиация: терминология, классификация, современное состояние» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.