Жан-Поль Эймишен - Электроника?.. Нет ничего проще!
Здесь есть возможность читать онлайн «Жан-Поль Эймишен - Электроника?.. Нет ничего проще!» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 1975, Издательство: Энергия, Жанр: sci_radio, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Электроника?.. Нет ничего проще!
- Автор:
- Издательство:Энергия
- Жанр:
- Год:1975
- Город:Москва
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Электроника?.. Нет ничего проще!: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Электроника?.. Нет ничего проще!»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Книга рассчитана на широкий круг читателей.
Электроника?.. Нет ничего проще! — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Электроника?.. Нет ничего проще!», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Н. — Ты верен себе. Сначала описываешь заманчивое решение, а затем, не объясняя причин, заявляешь, что воспользоваться им нельзя!

Л. — He горячись, нужно просто внести в первоначальную схему небольшие усовершенствования, и она станет пригодной для практического использования. Колебания, о которых я тебе говорил, действительно могут произойти. Они вызываются тем, что при автоматическом управлении антенна и двигатель ведут себя точно так же, как и при испытанном тобой ручном.
Когда двигатель приводит в движение антенну, чтобы привести ее в заданное положение, он приобретает определенную инерцию. В момент прихода антенны в нужное положение двигатель обесточивается, но инерция заставит его проскочить заданное положение, в результате чего напряжение на его выводах переменится и двигатель начнет вращаться в обратную сторону. Возможно, что возникшие таким образом колебания успокоятся и все сооружение войдет в состояние устойчивого равновесия, но также возможно, что колебательные движения будут продолжаться бесконечно. В этот момент должна включиться система гашения колебаний.
Н. — Я знаю, как вызвать затухание колебаний в контуре, но не представляю, как остановить колебательные движения двигателя?
Л. — И тем не менее используемые в обоих случаях способы весьма сходны. Чтобы вызвать затухание колебаний в контуре, к его выводам подключают сопротивление, вызывающее рассеяние энергии на этом сопротивлении. А для остановки двигателя в качестве верного решения я советую тебе расположить на его оси систему с высокой вязкостью. Это своеобразный тормоз — чем выше скорость, тем больший создается тормозной момент.
Подобный результат можно получить с помощью очень простого устройства (рис. 141), состоящего из медного диска, помещенного в межполюсный зазор мощного магнита. Наводимые в массе диска токи (токи Фуко) порождают силы, тормозящие вращение диска; чем выше частота вращения диска, тем эффективнее воздействуют на него силы торможения. В этих условиях приблизившаяся к заданному положению антенна не сможет значительно проскочить предназначенную точку и после нескольких колебаний с небольшой амплитудой окончательно установится в нужном месте.
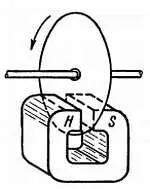
Рис. 141. Вращающийся в межполюсном зазоре магнита диск тормозится токами Фуко; чем выше скорость, тем больше сила торможения.
Н. — Да, это решение осуществимо, но оно мне совершенно не нравится, ибо, используя его, мы в значительной мере ограничиваем скорость двигателя. Это очень хорошо, когда антенна почти подошла в заданное положение, но не очень полезно, когда антенна находится еще далеко от предназначенной ей точки. Твоя система значительно увеличивает время, необходимое для установки антенны в рабочее положение.
Л. — Вызываемая задержка несколько меньше, чем ты думаешь. Не забывай, что чем дальше находится антенна от места, куда она должна прийти, тем больше напряжение между ползунками потенциометров. Поэтому подаваемое на двигатель напряжение увеличивается по мере увеличения предстоящего антенне пути. Следовательно, при большом пути двигатель может вращаться довольно быстро, несмотря на торможение; воздействие последнего становится преобладающим, когда антенна находится недалеко от заданной точки. А теперь я готов согласиться с тобой в том, что рассмотренное нами решение небезупречно.

Н. — Было бы очень хорошо иметь такой тормоз, который вступал в действие только в тот момент, когда антенна приближается к заданному положению, и лишь в том случае, если в этот момент двигатель вращается слишком быстро.
Л. — Незнайкин, ты стоишь на совершенно верном пути. Для решения сформулированной тобой задачи нужно наряду с напряжением между движками потенциометров ввести в усилитель, управляющий двигателем, напряжение, пропорциональное частоте вращения двигателя. Наиболее простой способ осуществления этой идеи заключается в механическом подключении к двигателю динамомашины, которую в подобных системах называют тахометрическим генератором . Этот генератор дает напряжение, пропорциональное частоте вращения двигателя, которое вычитают из разности потенциалов между движками потенциометров (рис. 142).
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Электроника?.. Нет ничего проще!»
Представляем Вашему вниманию похожие книги на «Электроника?.. Нет ничего проще!» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.


Обсуждение, отзывы о книге «Электроника?.. Нет ничего проще!» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.