Дмитрий Мамичев - Простые роботы своими руками или несерьёзная электроника
Здесь есть возможность читать онлайн «Дмитрий Мамичев - Простые роботы своими руками или несерьёзная электроника» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2016, ISBN: 2016, Издательство: СОЛОН-Пресс, Жанр: sci_radio, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Простые роботы своими руками или несерьёзная электроника
- Автор:
- Издательство:СОЛОН-Пресс
- Жанр:
- Год:2016
- Город:Москва
- ISBN:978-5-91359-185-2
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Простые роботы своими руками или несерьёзная электроника: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Простые роботы своими руками или несерьёзная электроника»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Содержание книги является логическим продолжением содержания двух первых книг — «Роботы своими руками. Игрушечная электроника» и «Игрушечная электроника NEXT», опубликованных в издательстве СОЛОН-ПРЕСС.
Книга будет полезна начинающим электронщикам разного возраста, как пособие по изготовлению практических изделий.
Простые роботы своими руками или несерьёзная электроника — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Простые роботы своими руками или несерьёзная электроника», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Рассмотрим пару самых «ходовых» механизмов. Итак, кривошипно-шатунный механизм (рис. 18) предназначен для преобразования вращательного (точка А ) движения в возвратно-поступательное движение (точка В ). Механизм является обратимым, следовательно, может преобразовывать возвратно — поступательное движение в движение по окружности.
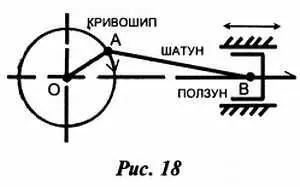
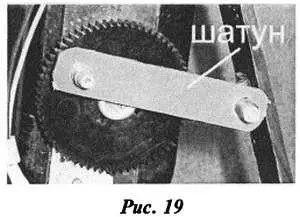
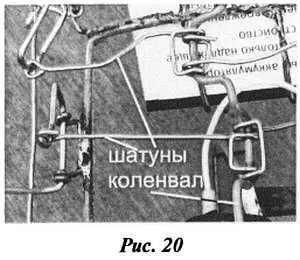
К основным элементам механизма относятся: кривошип, шатун и ползун. Они связаны друг с другом парой шарниров. Если нужно «организовать» на одном валу несколько взаимосвязанных механизмов, прибегают к использованию коленвала. Принцип действия механизма, конечно, не меняется. Наглядно представить работу механизма позволяют рисунки 19, 20.
Движение его ползуна неравномерное. В окрестностях «мёртвого хода» ползун движется с наименьшими скоростями.
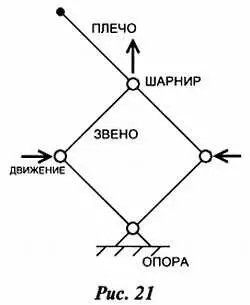
Шарнирно-рычажные механизмы. Они предназначены для смены направления движения одной части механизма относительно другой части. Кроме этого данные механизмы призваны менять длину хода рабочего рычага, увеличивая или уменьшая её. К их основным составным элементам относятся рычаги (звенья) и шарниры. Длина хода в этих механизмах увеличивается за счёт увеличения длины плеча рычага. Один из самых распространённых механизмов это четырёхзвенник (рис. 21). Каждый, наверное, по детству помнит лягушку-попрыгушку (рис. 22). Действие механизма этой игрушки приводило в восторг не одно поколение детей.

Ну а «школьники прошлого века» вероятно, помнят такой своеобразный ручной копир-сканер (рис. 23) под названием пантограф.
С его помощью можно было копировать контуры различных фигур, планов, чертежей, географических карт.
В игрушечном конструировании данные механизмы в явном виде используются при конструировании шагающих игрушек, моделирующих походку человека или насекомого.
Более подробно с другими интересными разновидностями приспособлений исполнительных устройств можно ознакомиться в книге — пособии «ТЕХНИЧЕСКОЕ ТВОРЧЕСТВО», изданной в 1956 году в издательстве «Молодая гвардия».
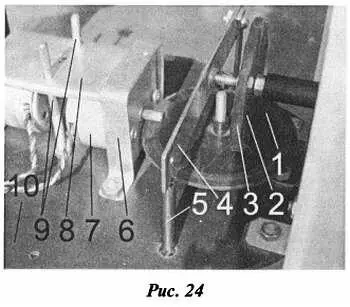
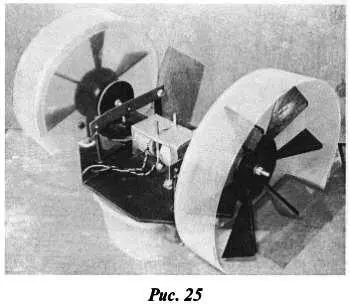
1. Если размеры редуктора не критичны, можно его изготовить из самодельных пластмассовых колёс. Например, в модели речного колёсного пароходика (рис. 24). Редуктор состоит из пары колёс 1, 2 . Вертикальное колесо снабжено резиновым кантом 3 и «подпружинено» через планку 4 пружиной 5 . Слева колесо-основание 1 «подпружинено» валом мотора 7 . Он сам крепится к П-образной пластинке 8 , ограниченной в пространстве П-образной скобой 6 и парой вертикальных направляющих штырей 9 . Между ними расположена пружина, притягивающая элемент 8 к основанию 10 . «Ходовая в сборе» изображена на рисунке 25, она состоит из двух симметричных частей.
2. Если предполагается, что игрушка будет ездить по ровной плоской поверхности на маленьких колёсах, то редуктор можно строить на одной понижающей паре (рис. 26).
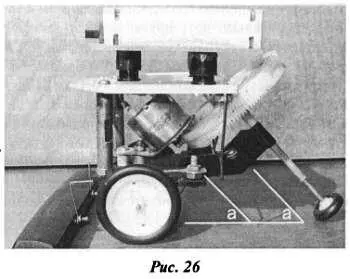
К некоторым неудобствам относится то, что валы двигателя и колеса расположены под острым углом к основанию. Подробно такой тип ходовой части описан в моей книге «Роботы своими руками. Игрушечная электроника», вышедшей в издательстве Солон-пресс.
3. Основные трудности при сборке и подгонке элементов механики сводятся к необходимости обеспечения лёгкого вращения колёс на осях с их ограничением движения вдоль оси и жёсткого крепления на валах с ограничением их продольного хождения.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Простые роботы своими руками или несерьёзная электроника»
Представляем Вашему вниманию похожие книги на «Простые роботы своими руками или несерьёзная электроника» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.








Обсуждение, отзывы о книге «Простые роботы своими руками или несерьёзная электроника» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.