Дмитрий Мамичев - Простые роботы своими руками или несерьёзная электроника
Здесь есть возможность читать онлайн «Дмитрий Мамичев - Простые роботы своими руками или несерьёзная электроника» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2016, ISBN: 2016, Издательство: СОЛОН-Пресс, Жанр: sci_radio, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Простые роботы своими руками или несерьёзная электроника
- Автор:
- Издательство:СОЛОН-Пресс
- Жанр:
- Год:2016
- Город:Москва
- ISBN:978-5-91359-185-2
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Простые роботы своими руками или несерьёзная электроника: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Простые роботы своими руками или несерьёзная электроника»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Содержание книги является логическим продолжением содержания двух первых книг — «Роботы своими руками. Игрушечная электроника» и «Игрушечная электроника NEXT», опубликованных в издательстве СОЛОН-ПРЕСС.
Книга будет полезна начинающим электронщикам разного возраста, как пособие по изготовлению практических изделий.
Простые роботы своими руками или несерьёзная электроника — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Простые роботы своими руками или несерьёзная электроника», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
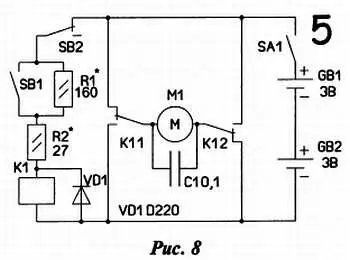
Довольно часто не удаётся найти двигатель на низкое рабочее напряжение. Тогда приходится питать его от всей батареи сразу.
Здесь нам может пригодиться сэкономленная группа контактов. Вариант схемы с питанием мотора напряжением 6 В изображён на рисунке 8. Поведенческий сценарий повторяет первый вариант.
И напоследок — ещё один вариант «неуправляемой агрессии» — рисунок 9.
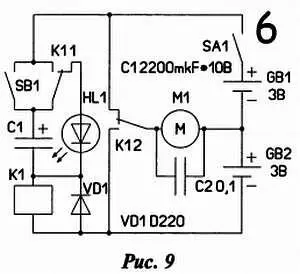
В схему добавлен красный сигнальный светодиод HL1- начала атаки препятствия. После включения питания робот устремляется в атаку на преграду. Столкнувшись (замыкание контактов SB1) он отскакивает и вновь бросается на «обидчика». Происходит это так: ток через контакты SB1 и разряженный конденсатор С1 подаётся на обмотку реле. Группа К1.1 самоблокирует реле, однако ток быстро убывает по мере зарядки конденсатора. Когда он снижается до величины ниже тока удержания реле — ток в цепи прерывается, робот начинает бежать вперёд. Одновременно конденсатор С1 разряжается через светодиод HL1 — он вспыхивает и цикл повторяется вновь.
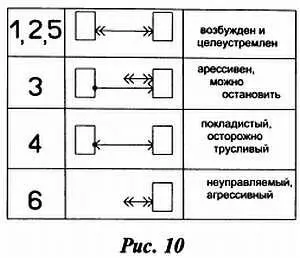
Вариации схем и соответствие характера поведения сведены в таблицу (рис. 10).
Конечно, читатель можно придумать ещё не одну подобную схемку поведения подопечного, было бы желание и интерес. А в заключение несколько вопросов для закрепления.
1. Как изменить схему (рис. 9), добавив светодиод, сигнализирующий об отступлении игрушки от преграды?
2. Как изменится сценарий поведения робота (схема рис. 6), если поменять местами подключение проводов двигателя M1?
3. Что изменится, если из схемы (рис. 4) изъять резистор?
Фантазии на тему конструкции или перспектива её изменений
Когда конструктору кажется, что изделие исчерпало свой «инновационный ресурс», возникает жгучее желание изменить что-то в нём кардинально. Для данной игрушки таким изменением может быть изменение ходовой части. Например, добавление второго двигателя с редуктором (рис. 11).
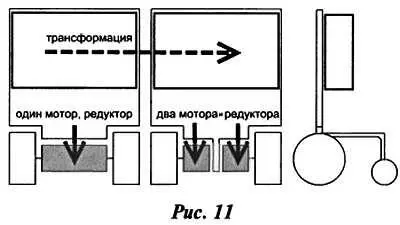
С такой «ходовой» робот может двигаться уже по всей плоскости. Вариант схемного решения представлен на рисунке 12.
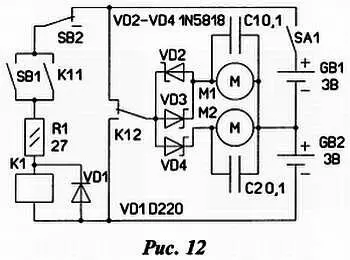
После включения питания робот устремляется вперёд, работают оба двигателя. Питание на них подаётся от батареи GB1 через развязывающие диоды VD3, VD4. После столкновения игрушки, реле самоблокируется и ток подаётся от батареи GB2 только на двигатель М1 через диод VD2. Робот отворачивает от преграды «одним боком». Затем происходит срабатывание датчика SB2, цепь обмотки реле размыкается. Вновь включается «полный вперёд» и робот «бежит от преграды» уже по другой «дорожке». В таком варианте потребуется замена «солевых» элементов АА на «алкалиновые».
Исключив диоды и соединив моторы параллельно можно попробовать повторить кинематику шагающих игрушек. Например, ходовая часть шагающего робота (рис. 13), позаимствованная из работы Марка Тилдона «Controller for a four legged walking machine» вполне подходит для экспериментов.

Управление работой датчиков можно осуществлять с помощью задних ног робота.
Вновь вернёмся к исходной схеме рисунка 4. Она может стать основой конструкции, концепт которой изображён на рисунке 14.
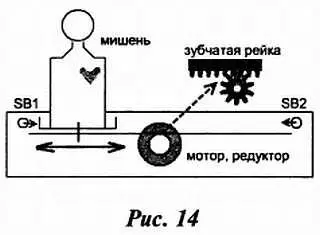
Это подвижная мишень для тренировки стрельбы из игрушечного пружинного пистолета. Механика изделия строится на зубчатой рейке (пластмассовый вариант такой передачи имеется в DVD приводе компьютера). Благодаря работе датчиков SB1, SB2 мишень движется возвратно-поступательно. Ещё один концепт изделия поясняет рис. 15.

«Мишка» методично бьёт в колокольчик, оповещая окружающих о чём-то важном. Его фигурка на шарнире участвует в возвратно-вращательном движении. Концевики-датчики ограничивают амплитуду колебаний. Редуктор желательно использовать с возможно большим коэффициентом понижения, а в оконечном звене — фрикционную передачу.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Простые роботы своими руками или несерьёзная электроника»
Представляем Вашему вниманию похожие книги на «Простые роботы своими руками или несерьёзная электроника» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.








Обсуждение, отзывы о книге «Простые роботы своими руками или несерьёзная электроника» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.